
Evaluando el concepto de impresión tridimensional de endodoncia guiada en el perro

Evaluando el concepto de impresión tridimensional de endodoncia guiada en el perro
 Jiahui Peng1†
Jiahui Peng1† Jie Yang2†Ruiyu Liu1
Jie Yang2†Ruiyu Liu1 Haifeng Liu1
Haifeng Liu1 Zhijun Zhong1
Zhijun Zhong1 Guangneng Peng1Kun Zhang1
Guangneng Peng1Kun Zhang1 Chengli Zheng2*
Chengli Zheng2* Ming Zhang3*
Ming Zhang3* Ziyao Zhou1*
Ziyao Zhou1*- 1Facultad de Medicina Veterinaria, Universidad Agrícola de Sichuan, Chengdu, China
- número arábigoInstituto de Cría de Ciervos Almizcleros de Sichuan, Chengdu, China
- 3Facultad de Ciencia y Tecnología Animal, Universidad Agrícola de Sichuan, Chengdu, China
Introducción: La endodoncia guiada representa un método eficaz para lograr una cirugía endodóntica segura y fiable en la medicina humana. Sin embargo, rara vez se emplea en la odontología de animales pequeños. Este estudio empleó análisis de elementos finitos y técnicas de impresión tridimensional (3D) para explorar la viabilidad de la endodoncia guiada en dientes mandibulares de Beagle.
Métodos: La metodología incluyó el procesamiento de datos de tomografía computarizada (TC), la creación de plantillas matemáticas y de impresión 3D de las vías del conducto radicular, y la evaluación de la endodoncia guiada por impresión 3D en perros en comparación con el método clásico del conducto radicular mediante radiografía.
Resultados: En este experimento, se registraron las coordenadas del punto central de la corona pulpar y el punto del ápice de cada diente. A partir de la línea de extensión del punto central del orificio del conducto radicular dental y el punto del ápice, se diseñaron plantillas endodónticas guiadas en cada conducto radicular de 20 dientes en la mandíbula Beagle. Entre ellos, la desviación relativa promedio de la endodoncia guiada y el método clásico de conducto radicular fue de 4,28% ± 2,75%, y la desviación angular media fue de 1,90 ± 0,25°.
Discusión: Nuestra investigación indicó que la endodoncia guiada por impresión 3D para perros tiene una posición, dirección y longitud precisas, lo que puede ayudar a la odontología veterinaria en el tratamiento del conducto radicular en animales pequeños.
1 Introducción
El esmalte de los perros presenta un componente particularmente delgado en espesor (incluso <0,1 mm), lo que lo hace susceptible a daños durante las actividades funcionales, lo que provoca lesiones en la pulpa (1). En consecuencia, las enfermedades pulpares y periapicales representan las afecciones dentales más prevalentes que se encuentran en la práctica veterinaria (2). Como tal, el tratamiento del conducto radicular es la intervención principal y más efectiva para abordar las lesiones pulpares y periapicales tanto en medicina humana como veterinaria (3). Este abordaje terapéutico alivia eficazmente los síntomas asociados a la pulpitis, la inflamación periapical y la necrosis pulpar (4). Recientemente, se ha demostrado que la endodoncia guiada es un método eficaz para lograr resultados favorables en pacientes humanos (5). Sin embargo, su aplicación en la odontología de pequeños animales sigue siendo relativamente desconocida, principalmente debido al limitado acceso de la odontología veterinaria a equipos especializados sofisticados (6). Con el desarrollo de la implantación dental guiada que utiliza tomografías computarizadas (TC) y análisis tridimensional (3D) de elementos finitos (FEA), puede estar disponible una solución viable para el acceso preciso en dientes con anatomía dental compleja en odontología veterinaria (7-9). Tiene el potencial de lograr resultados predecibles y seguros al proporcionar a los médicos una visualización virtual de la posición y el ángulo de perforación durante la etapa de planificación, lo que facilita los ajustes necesarios y mejora la previsibilidad del procedimiento (10).
Un abordaje endodóntico guiado con precisión requiere no solo un equipo de imágenes avanzado, sino también un software de procesamiento de imágenes adecuado. El estudio empleó varios programas operativos de análisis de elementos finitos para facilitar este proceso. El primer software utilizado fue Mimics Medical (11), que está especialmente diseñado para TC, resonancia magnética y otros procesamientos de imágenes médicas. Su función principal es extraer información valiosa de las imágenes médicas y aplicarla tanto a la práctica clínica como a los esfuerzos de investigación. Los softwares digitales 3D, Geomagic Wrap (12) y SOLIDWORKS (13), también fueron necesarios para crear y diseñar modelos 3D complejos de diseño asistido por ordenador (CAD), incluido el montaje, el análisis y la simulación. En las últimas décadas, la tecnología de impresión 3D se ha convertido en una herramienta importante en el campo de la odontología. Puede transformar los datos de imágenes digitales en modelos 3D de alta precisión, permite la replicación precisa de estructuras anatómicas y, además, convierte la visualización virtual en una guía en tiempo real (14). Por lo tanto, tiene el potencial de apoyar la aplicación de la endodoncia guiada en la odontología veterinaria. La integración del software especializado, junto con la tecnología avanzada de imágenes e impresión 3D, permite la planificación y ejecución precisas de la endodoncia guiada.
En teoría, la endodoncia guiada simulada por FEA debería tener una gran precisión para el trayecto quirúrgico. Sin embargo, la tecnología de impresión 3D y las experiencias operativas actuales en odontología veterinaria siguen siendo relativamente desconocidas, lo que puede hacer desviaciones en las prácticas clínicas. Aquí, el objetivo de este estudio es investigar la precisión de la endodoncia guiada de los dientes mandibulares de Beagle utilizando FEA y plantillas impresas en 3D, en comparación con el método clásico de conducto radicular. Nuestro estudio consiste en simular el tratamiento del tratamiento del conducto radicular mediante el procesamiento de datos de TC, la creación de matemáticos, la impresión 3D de la endodoncia guiada y la evaluación de las vías del conducto radicular mediante radiografía, lo que presenta un enfoque novedoso para abordar los desafíos que enfrentan los tratamientos endodónticos veterinarios en animales pequeños.
2 Materiales y métodos
2.1 Establecimiento de un modelo informático de mandíbula de perro
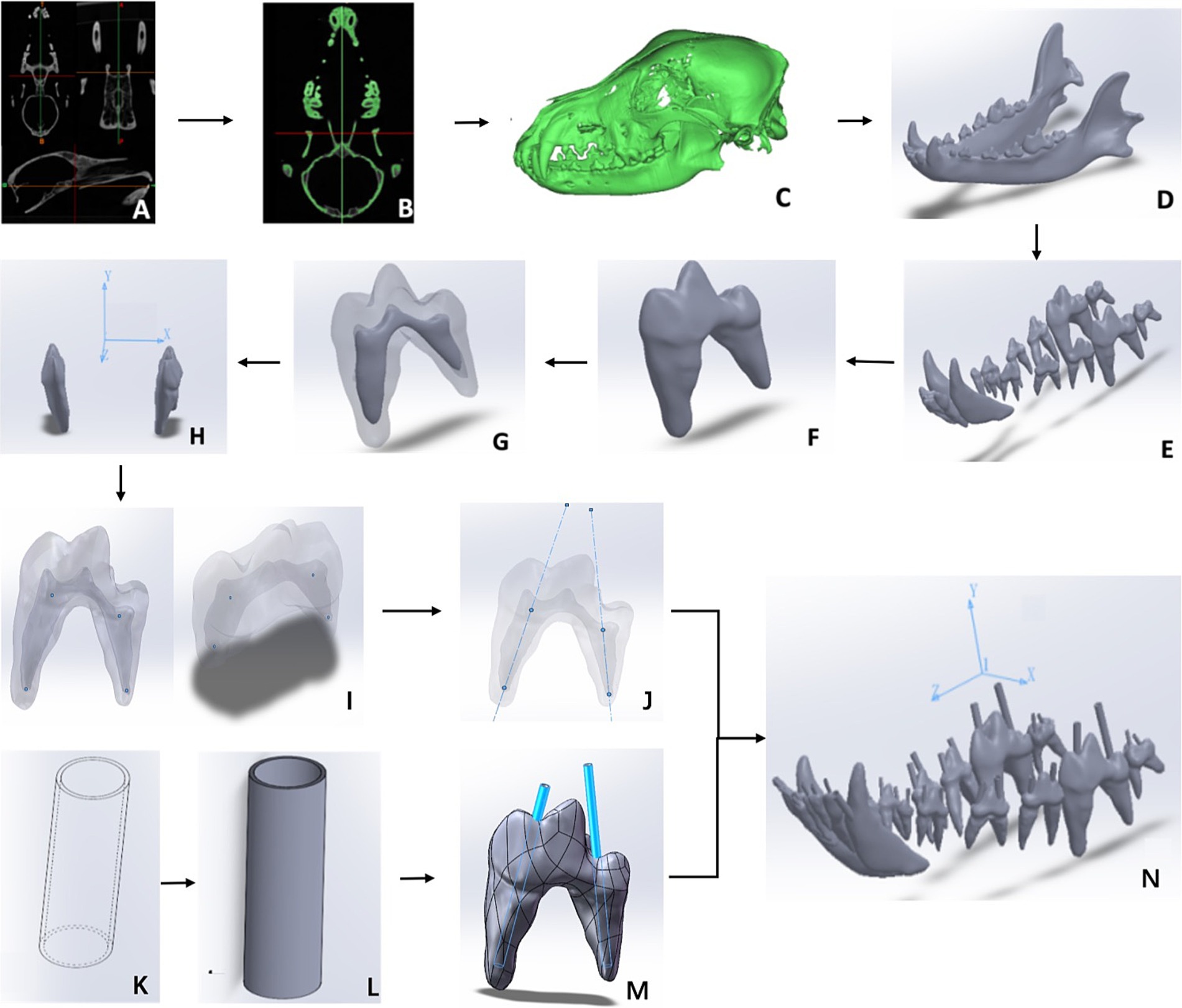
Se realizó una tomografía computarizada en un Beagle adulto sano de acuerdo con las instrucciones del fabricante (uCT503e, detector de 40 cortes, 40 cortes, voltaje 120 kV, corriente 250 mA, matriz de reconstrucción 512 × 512, espesor de corte 1 mm, algoritmo de reconstrucción de ventana ósea con ancho de ventana de 2.600 HU y posición de ventana de 800 HU, algoritmo de reconstrucción de ventana de tejido blando con ancho de ventana de 300 HU y posición de ventana de 40 HU, Centro de imágenes de ultrasonido de Chengdu Co., Ltd., China). El perro no presentaba fracturas, osteoporosis, tumores u otras enfermedades de la cabeza. Las imágenes de TC (Figura 1A) se importaron a Mimics Medical (Materialise Co., Ltd. Bélgica, versión 21.0.406) en formato DICOM para su procesamiento. En primer lugar, se utilizó la función «Nueva máscara» para crear un modelo de malla 3D de la mandíbula del perro (Figura 1B). En segundo lugar, se utilizó la función «Editar máscara» para editar el área de la máscara, eliminando el maxilar y el cráneo y separando los fragmentos óseos de los caninos mandibulares, premolares y molares que estaban conectados al maxilar. Se utilizó la función «Región de crecimiento» para generar una estructura separada de las otras regiones, lo que resultó en una muestra gruesa del modelo de mandíbula de perro (Figura 1C). El hueso cortical y el hueso esponjoso se separaron mediante la función «Erosión». A continuación, el archivo de estereolitografía se importó a Geomagic Wrap (Geomagic Co., Ltd. Estados Unidos, versión 2021.0.0.3008). La superficie se suavizó utilizando las funciones «Eliminación de características» y «Relleno de agujeros». A continuación, se empleó la función «Superficie precisa» para ajustar con precisión la superficie, lo que permitió la edición selectiva y la eliminación del ruido, generando así un modelo 3D del hueso mandibular. Finalmente, los gráficos mandibulares se exportaron en formato STP y se importaron a SOLIDWORKS (Dassault Systèmes S.A Co., Ltd. Francia, versión 29.0.0.5028) para su materialización (Figura 1D).
2.2 Extracción y aislamiento de dientes mandibulares
En el software SOLIDWORKS, se localizaron 20 dientes en el hueso mandibular Beagle y se extrajeron virtualmente (Figura 1E). Posteriormente, se utilizó la función «Region Growing» para eliminar el ruido no continuo. Todo el diente se reconstruyó utilizando «Edición 3D» y «operación booleana» para eliminar partes de artefactos de cada diente individual, lo que hace que el diente se convierta en un polígono de superficie fina (Figura 1F) (15). La cavidad pulpar y la dentina se reconstruyeron por separado (Figura 1G) (16). A continuación, se utilizó la función «Sistema de coordenadas» en el software SOLIDWORKS para generar un sistema de coordenadas 3D compuesto por los ejes XYZ, exportado en formato STL (Figura 1H).
2.3 Establecimiento de un modelo de endodoncia
En el software SOLIDWORKS, el centro anatómico del cráneo se tomó como coordenadas de origen (0, 0, 0). Se empleó la función de «geometría de referencia» para identificar las coordenadas del punto central del orificio del conducto radicular dental (x1, y1, z1) y el punto del ápice (x2, y2, z2) para cada diente (Figura 1I). Teóricamente, existe una línea recta entre dos puntos en el espacio 3D (17). Se realizó la función «Curva a través de puntos XYZ» para generar las coordenadas lineales del conducto radicular de acuerdo con los dos puntos para cada diente (Figura 1J).
Sobre la base de la línea de extensión del conducto radicular y la superficie del diente, se construyó un manguito de guía del conducto radicular hacia el exterior con un grosor de 1 mm. Con el diámetro del diámetro máximo del conducto radicular, los modelos de guía de tamaño proporcional se estiraron a continuación en un cilindro hueco 3D (Figuras 1K, L). La guía se extendió hasta el borde incisal para permitir el acceso en línea recta (Figura 1M). Con el fin de garantizar la precisión de las posiciones de cada diente, también realizamos el cráneo completo (Figura 1N). El modelo resultante se exportó como un archivo «STL».
2.4 Experimento de endodoncia in vitro
El experimento de endodoncia in vitro se llevó a cabo en copias separadas del mismo perro Beagle. Un total de 30 endodoncias de 20 dientes de la mandíbula inferior (incluyendo 6 incisivos, 2 caninos, 8 premolares y 4 molares) de Beagle fueron sometidos a tratamiento de endodoncia. Inicialmente, la plantilla de cada diente se imprimió de acuerdo con las instrucciones de la fábrica (SLA550Li, material: resina fotosensible, Ultrust Imaging (Chengdu) Center Co., Ltd., China). Se produjeron dos copias separadas del mismo modelo para los tratamientos endodónticos guiados y los tratamientos del método clásico, respectivamente. El primer modelo mandibular se utilizó para el tratamiento endodóntico guiado, y la plantilla de conducto radicular guía impresa en 3D se colocó en el diente. En primer lugar, se comprobó el ajuste correcto y reproducible de la plantilla y el diente correspondiente. La cavidad se extendió hasta el borde incisal para permitir el acceso en línea recta, paralela al eje largo del diente para la fresa, estableciendo un camino preparatorio para la entrada en la pulpa dental y determinando la longitud de trabajo del conducto radicular. El segundo modelo mandibular se utilizó para el tratamiento del conducto radicular mediante el método clásico. Se implementó la ruta del conducto radicular del método clásico, incluidas las radiografías preoperatorias y el acceso abierto a la pulpa por un dentista certificado en animales pequeños de la Asociación Médica Veterinaria China. Se midieron las longitudes de cada endodoncia por dos métodos, desde el orificio central del conducto radicular dental hasta el ápice. Se evaluó la desviación angular de los dos métodos para verificar la precisión de la vía endodóntica guiada en comparación con el método clásico.
2.5 Análisis estadístico
Se realizó un análisis estadístico de las longitudes de conducto radicular medidas y de las desviaciones angulares de los dos métodos. La comparación estadística de la distribución de los datos se probó mediante la prueba t de Student utilizando el programa SPSS v27 (IBM, Nueva York, Estados Unidos). P < 0,05 se consideró estadísticamente significativo.
3 Resultados
3.1 Líneas guiadas de conducto radicular diseñadas por ordenador
En el montaje digital del conducto radicular dental, se midió el diámetro de la pulpa coronal del diente mandibular y se registró en la Tabla Suplementaria S1. De acuerdo con el sistema de coordenadas espaciales del eje xyz, se fabricaron un total de 30 plantillas endodónticas guiadas en 20 dientes de la mandíbula. Se corroboraron treinta coordenadas del punto central del orificio del conducto radicular dental (x1, y1, z1) y el punto del ápice (x2, y2, z2) para cada diente (Tabla 1). El primer molar izquierdo (309) como ejemplo ilustra los resultados del ensamblaje digital del conducto radicular de un modelo mandibular estéreo en 3D.
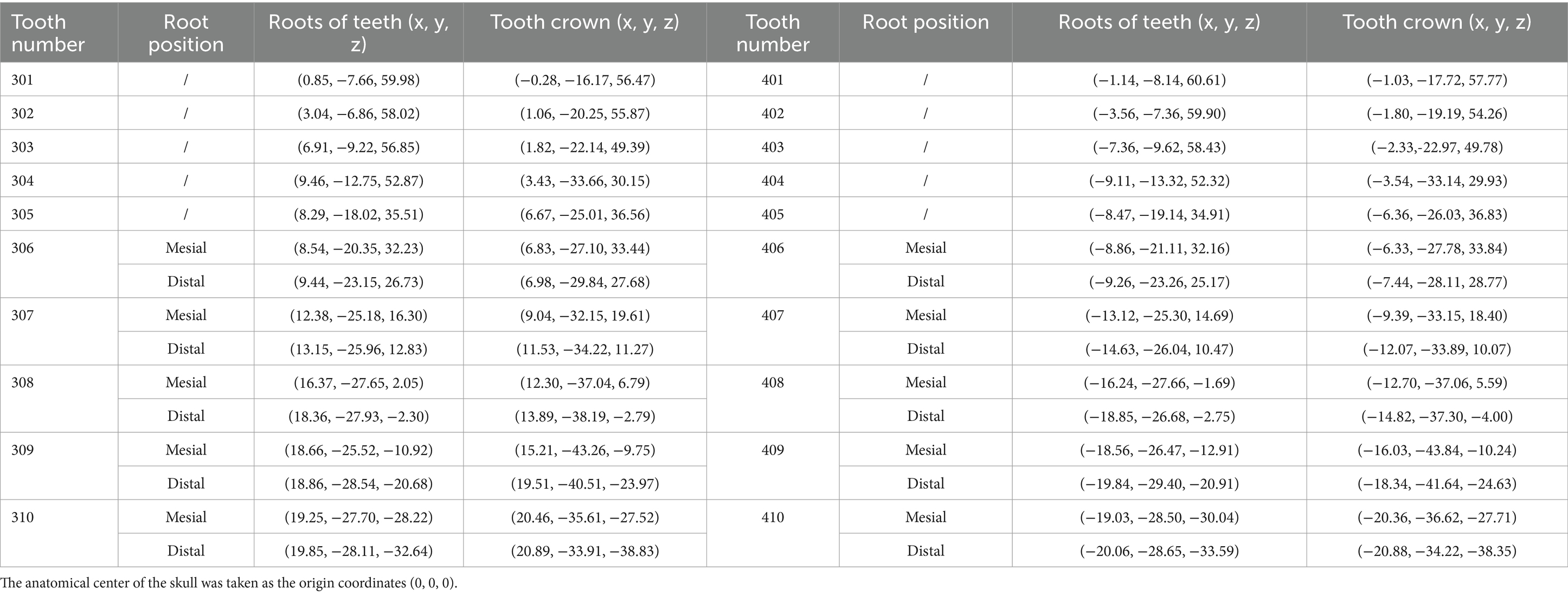
Tabla 1. Coordenadas del punto central del orificio del conducto radicular dental (x1, y1, z1) y el punto del vértice (x2, y2, z2) para cada diente.
Los diámetros de los dos conductos radiculares del primer molar izquierdo del Beagle (309) fueron de 5,91 mm y 5,05 mm, respectivamente. Las coordenadas de la raíz mesial del primer molar se midieron en el espacio 3D fueron (18.66, −25.52, −10.92) y (15.21, −43.26, −9.75), respectivamente. Las coordenadas de la raíz distal fueron (18.86, -28.54, -20.68) y (19.51, -40.51, -23.97), respectivamente. Allí, se podían dibujar líneas guiadas de conducto radicular en los dientes de acuerdo con los puntos.
3.2 Plantillas endodónticas mandibulares y guiadas impresas en 3D
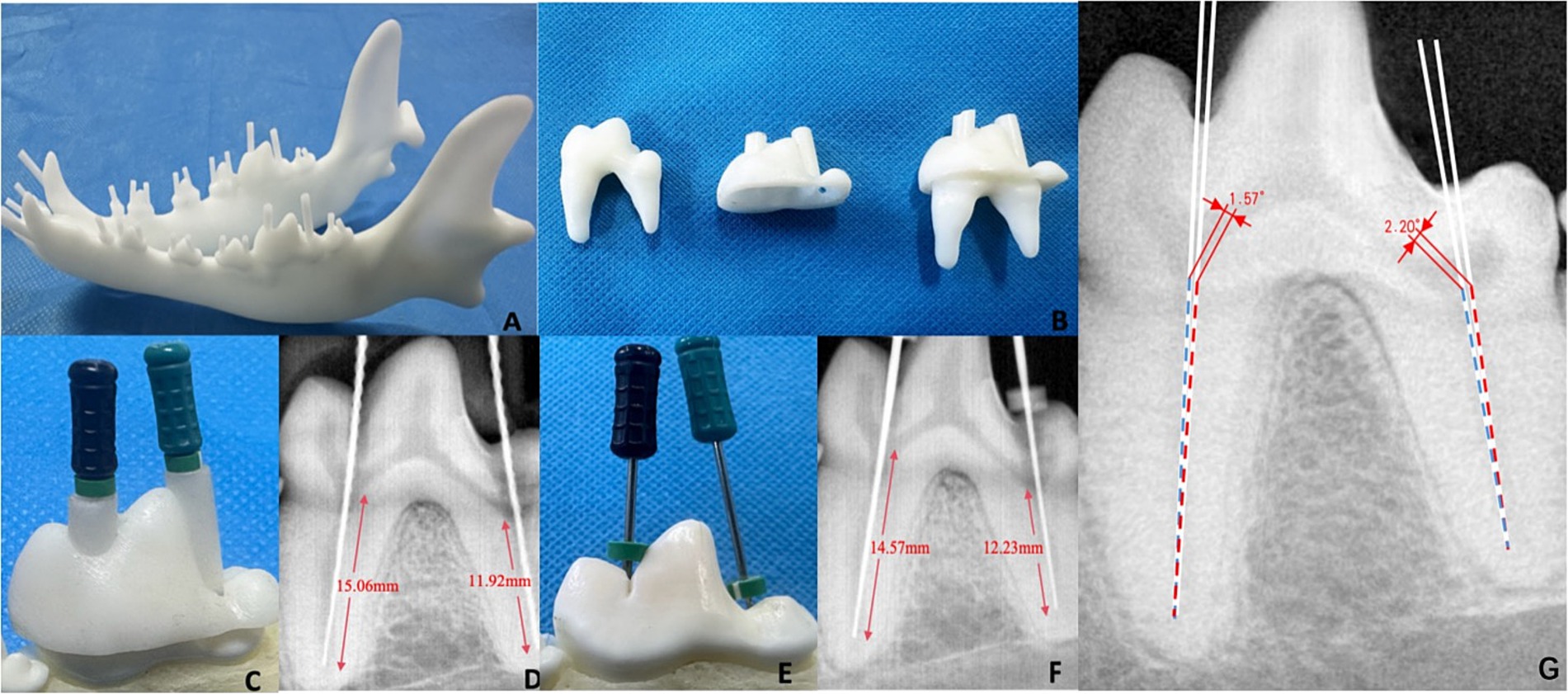
La impresión 3D se realizó a través del modelo establecido, ilustrado con un ajuste preciso de la plantilla y los dientes impresos (Figura 2A). También se realizaron mediciones individuales de la longitud, anchura y altura de cada diente en los dientes de Beagle extraídos virtualmente (Tabla Suplementaria S2). En concreto, el primer molar tenía una longitud de 20,43 mm, una anchura de 7,87 mm y una altura de 13,95 mm. El tamaño de la plantilla era de 24,43 mm × 11,87 mm × 15,95 mm. Esta plantilla era totalmente compatible con el primer molar (Figura 2B). Se introdujo la vía lineal que está incrustada en la cámara pulpar (Figura 2C). El diámetro máximo del manguito del conducto radicular del primer molar en la imagen era esencialmente una anastomosis al diámetro cuadrado de la pulpa coronal. Desde el punto de vista del ajuste, es posible que la plantilla endodóntica guiada para el primer molar no cause la desviación de la orientación y el ángulo después de la inserción de los instrumentos de conducto radicular (Figura 2D).
3.3 Comparación de la endodoncia guiada por impresión 3D y el método clásico de conducto radicular
En el experimento de evaluación, se realizó un tratamiento de conducto radicular en un total de 30 cámaras pulpares de 20 dientes mandibulares en Beagle. Tomando como ejemplo el primer molar, el examen radiográfico reveló que el conducto radicular era una línea directa que llegaba al ápice sin doblarse, dañarse o ser excesivamente larga. La longitud del conducto radicular mesial fue de 15,06 mm, mientras que la longitud del conducto radicular distal fue de 11,92 mm (Figura 2D). Por otro lado, la longitud del conducto radicular mesial del primer molar mediante el método clásico de conducto radicular fue de 14,57 mm, mientras que el conducto radicular distal fue de 12,23 mm (Figuras 2E,F). La desviación angular de la vía del conducto radicular entre dos métodos fue de 1,57° (raíz mesial) y 2,20° (raíz distal), respectivamente (Figura 2G). Para aclarar, para hacer la figura legible y medible, las dos líneas virtuales de la Figura 2G fueron redibujadas por las vías de conducto radicular operadas de dos métodos en un nuevo diente de copias separadas del mismo perro Beagle. De los 30 conductos radiculares, la desviación relativa de la endodoncia guiada y los métodos clásicos fue de 0,57% (304 raíz) a 10,71% (408 raíz distal), con una desviación promedio de 4,28 ± 2,75%. La desviación angular media fue de 1,90° ± 0,25°, con un rango de 1,50° (raíz distal 306) a 2,33° (raíz distal 310) (Tabla 2).
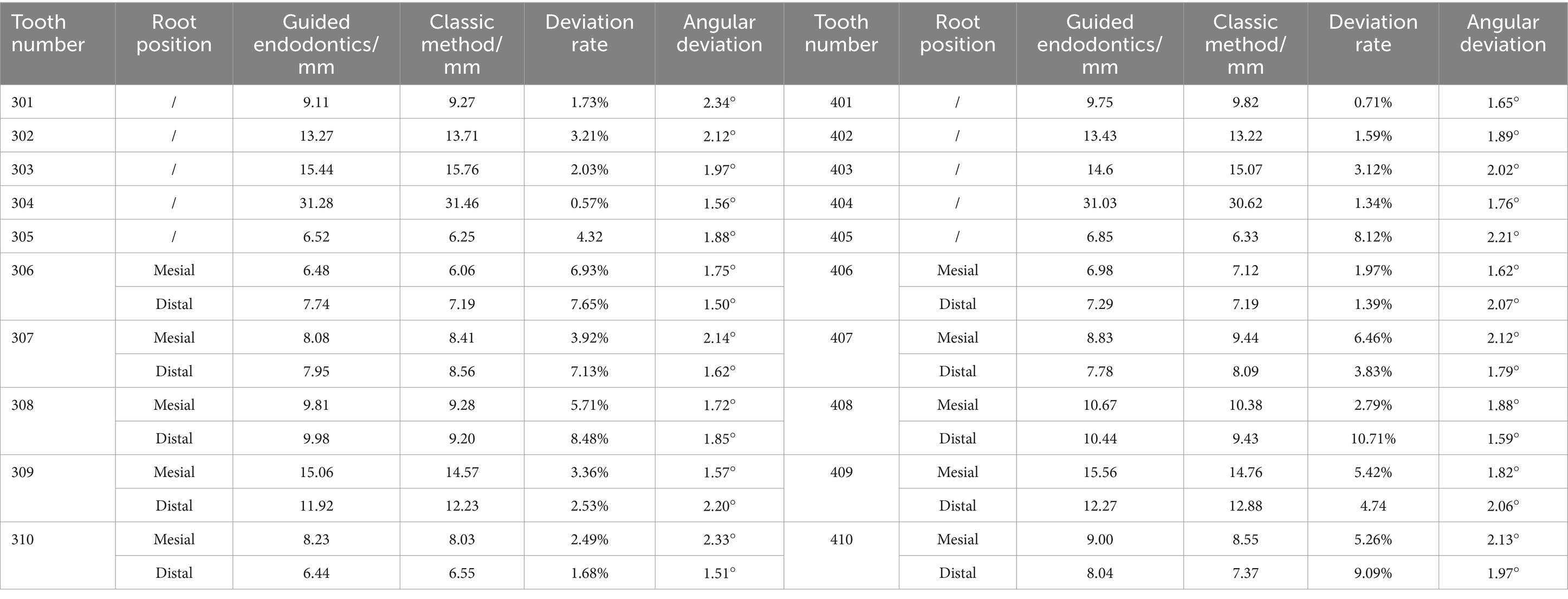
Entre cada tipo de dientes, los premolares presentaron la mayor variación en la longitud, con un 5,57% ± un 2,72%. entre la endodoncia guiada y el método clásico, significativamente superior a los incisivos (2,07% ± 0,96%, p = 0,0170), pero similar con los molares (4,32% ± 0,37%, p = 0,0515). Sin embargo, no hubo diferencia significativa de la desviación angular entre los dientes, con incisivos de 2,00° ± 0,23°, premolares de 1,84° ± 0,23° y molares de 1,95° ± 0,29°, respectivamente.
4 Discusión
En la actualidad, el tratamiento del conducto radicular depende en gran medida de la experiencia y la competencia técnica de los dentistas experimentados. Existen varias causas potenciales de fracaso en esta intervención quirúrgica, que incluyen: (1) Desviación en el acceso al tratamiento del conducto radicular: angulación incorrecta del acceso a la cámara pulpar, exposición incompleta de la cámara pulpar o exposición inadecuada de los orificios del conducto radicular, perforación del piso de la cámara, perforación de las paredes del conducto radicular, canales faltantes o interpretación incorrecta de anomalías del conducto radicular, por ejemplo, configuraciones de conducto radicular en forma de C (18); (2) Desviación en la preparación del conducto radicular: agrandamiento excesivo del conducto radicular, formación de repisas, separación del instrumento o limpieza incompleta del conducto radicular. Por ejemplo, Lee et al. (19) llevaron a cabo una evaluación de los resultados del tratamiento de conducto radicular en 281 dientes en 204 perros, y se observó que los dientes multirradiculares con una morfología radicular más compleja tenían resultados menos favorables. Kuntsi-Vaattovaara et al. (20) evaluaron los resultados de los procedimientos de endodoncia en 127 casos y encontraron que la tasa de fracaso aumentó debido a la fractura del conducto radicular, la fractura del diente secundario y los protocolos de tratamiento incorrectos. En tales casos, el tratamiento del conducto radicular puede llegar a ser extremadamente desafiante, lo que a menudo resulta en tasas más altas de fracaso del tratamiento (21, 22). La gran dependencia de la experiencia individual de los odontólogos es una limitación importante en el campo de la endodoncia, especialmente en la odontología de pequeños animales. El desarrollo de un enfoque de ayuda para el tratamiento del conducto radicular podría ayudar a mitigar el riesgo de complicaciones y mejorar el pronóstico general de los pacientes. Con el fin de minimizar el riesgo de errores técnicos y acortar el tiempo de tratamiento, se desarrollaron métodos de diseño asistido por ordenador para localizar el conducto radicular de forma mínimamente invasiva, denominados «endodoncia guiada» (23).
Los estudios de laboratorio e in vitro han reportado un alto nivel de precisión al comparar la vía de conducto radicular instrumentada real con el enfoque previamente planificado utilizando técnicas guiadas (24, 25). Además, estos métodos endodónticos guiados han demostrado tasas de éxito prometedoras cuando se aplican en casos clínicos en medicina humana (26). Por ejemplo, Jain et al. (27) realizaron un estudio en el que evaluaron el uso de la preparación conservadora de la cavidad de acceso en un modelo de diente impreso en 3D que constaba de 84 dientes y 138 endodoncias, y descubrieron que el enfoque guiado permitía una alta precisión en el acceso al conducto radicular. De manera similar, Chong et al. (28) realizaron una preparación conservadora de la cavidad de acceso en dientes humanos extraídos intactos utilizando métodos guiados, logrando una tasa de éxito del 89%. Además, Torres et al. (29) utilizaron un tratamiento endodóntico guiado y reportaron una impresionante tasa de precisión del 93% en la localización e instrumentación de los conductos radiculares. Antes de iniciar el tratamiento, es ventajoso simular todo el proceso utilizando tecnología informática. Esta metodología permite a los veterinarios formular un plan factible para las operaciones clínicas reales para una mejor ubicación y angulación, minimizando en última instancia la eliminación de la estructura dental preciosa.
Sin embargo, la aplicación de la endodoncia guiada en la odontología de pequeños animales sigue siendo desconocida. Los cambios en la morfología de los dientes, los diversos grados de desgaste de los dientes y la orientación inconsistente de la pulpa son factores clave que afectan el tratamiento del conducto radicular, por ejemplo, los dientes caninos suelen poseer una sola pulpa que es más estrecha y más larga, mientras que el primer molar contiene dos pulpas con sus respectivas raíces orientadas en diferentes direcciones. Por lo tanto, nuestro estudio utilizó tecnología FEA e impresión 3D para realizar y evaluar la eficacia de la endodoncia guiada en dientes mandibulares de perros. Nuestros resultados indicaron que la endodoncia guiada fue similar al método clásico de conducto radicular por un especialista en odontología. Esta endodoncia guiada se basa en una serie de software especializado que incorpora datos de imágenes de TC preoperatorias y FEA. A pesar de que existen varios software de diseño de implantes dentales, como Pro/E (30), 3Shape (31) y DentalNavi (32), parece haber algunas limitaciones para diseñar plantillas de conductos radiculares para animales pequeños. Por ejemplo, algunas de las pulpas tienen estructuras curvas dentro de los dientes que hacen que la posición de la raíz varíe, el software de diseño de implantación específico es difícil determinar con precisión las coordenadas de la raíz y la corona en el espacio tridimensional. Además, el software de diseño de implantación específico solo puede incluir funciones profesionales que sean relevantes con la vía de implantación. Por lo tanto, nos permite crear plantillas con un flujo integral que se ajusta estrechamente a las características de las pulpas. Dada la complejidad e incertidumbre inherentes a los procedimientos quirúrgicos clínicos, la simulación preoperatoria de la endodoncia guiada podría ser un componente complementario para la planificación y ejecución de la operación.
Las ventajas de la endodoncia guiada incluyen: (1) FEA, cuando se integra con datos de TC específicos del paciente, puede proporcionar representaciones altamente precisas de las condiciones anatómicas del individuo e información 3D precisa; (2) La capacidad de generar herramientas de guía quirúrgica personalizadas e implantes personalizados puede reducir el tiempo y los costos del producto de fabricación (33). (3) La planificación preoperatoria puede mejorarse significativamente y, por lo tanto, aumentar la tasa de éxito de las intervenciones quirúrgicas. Sin embargo, la serie de software FEA para la endodoncia guiada requería un alto nivel de complejidad operativa, así como una base sólida en informática. Al medir la longitud de la cámara pulpar, es necesario planificar estratégicamente la ruta de inserción del conducto radicular en función de puntos de medición específicos basados en la corona. En comparación con el tratamiento clásico del conducto radicular, la endodoncia guiada puede ayudar a determinar la posición más adecuada para acceder al conducto radicular, reduciendo así los requisitos operativos. Además, algunos estudios han informado de los beneficios de este enfoque guiado mínimamente invasivo, incluyendo una mayor resistencia a las fracturas y la máxima preservación de la estructura dental natural (34, 35). En comparación con el tratamiento clásico del conducto radicular, las ventajas biomecánicas de la endodoncia guiada pueden preservar la estructura dental y pueden contribuir a mejorar la recuperación y cicatrización postoperatoria del paciente (36). En la actualidad, en el campo de la medicina veterinaria, no existe suficiente literatura e investigación que demuestre que el método de endodoncia guiada en la biomecánica y la cicatrización postoperatoria de los dientes de los animales, necesitaba una mayor verificación.
En nuestra experiencia en endodoncia guiada, es de suma importancia asegurar un ajuste preciso entre la plantilla de endodoncia guiada construida y el conducto radicular, lo cual es fundamental para prevenir la introducción de direcciones sesgadas durante la intervención clínica (37). Por lo tanto, antes de imprimir la plantilla endodóntica guiada en 3D, se recomienda encarecidamente asegurarse manualmente de que las dimensiones de los puntos de coordenadas dentro del software SOLIDWORKS se ajusten, evitando así cualquier discrepancia entre la plantilla y el conducto radicular después del ensamblaje final. Además, dada la importancia primordial de la profundidad y la dirección adecuadas de la cavidad en el procedimiento clínico, es esencial volver a confirmar exhaustivamente la longitud y el tamaño de la endodoncia guiada simulada digital. En algunos casos, incluso puede ser necesario volver a medir los parámetros numéricos del conducto radicular y realizar un segundo montaje de posicionamiento para garantizar un ajuste adecuado. Sin embargo, hubo un error ineludible entre los resultados de la operación y el plan anticipatorio del modelo 3D. En nuestros resultados, las diferencias en la longitud del conducto radicular de los premolares fueron significativamente mayores que las de los incisivos, lo que puede deberse a que los dos conductos radiculares en algunos premolares compartían un acceso pulpar abierto común, lo que afecta la dificultad de operación. Sin embargo, no hubo diferencia significativa en la desviación angular entre los dientes, con solo 1,90° ± 0,25°, lo que puede ser adecuado para la operación clínica.
Sin embargo, es importante reconocer las limitaciones inherentes asociadas con este estudio. El estudio utilizó perros Beagle para el FEA, y los parámetros de datos y las plantillas de endodoncia guiada pueden no ser directamente aplicables a otras razas de perros. Debido a las variaciones en los tipos de cuerpo, el sexo y la edad, así como a los cambios en la estructura dental, las plantillas de conducto radicular generadas por perros de la misma raza pueden diferir significativamente. Los casos dentales complejos a menudo vienen con mayores demandas operativas, lo que presenta un desafío significativo para las habilidades y la experiencia del profesional (38). Aunque, como experimento preliminar, no evaluamos la impresión 3D en un tratamiento complejo de conductos radiculares como el conducto radicular en forma de C, sin duda es una buena aplicación para la endodoncia guiada (39). Además, este método tiene requisitos estrictos para el uso de dispositivos médicos orales y, a menudo, requiere más tiempo y recursos para minimizar la probabilidad de fracaso quirúrgico. Por otro lado, el método de plantilla implica una tomografía computarizada, lo que permite una simulación completa de todo el proceso quirúrgico dentro de un software especializado. Si bien el diseño y la impresión de plantillas pueden llevar algún tiempo adicional, pueden proporcionar una idea de referencia para guiar el tratamiento del conducto radicular y también desempeñar un cierto papel en la promoción del tratamiento del conducto radicular. Además, la mayoría de los materiales de impresión 3D están compuestos por un solo material de resina (40), que puede no replicar con precisión las complejas propiedades estructurales y materiales de la dentición natural. La endodoncia guiada con FEA representa un enfoque seguro y directo, especialmente teniendo en cuenta el potencial de desarrollo adicional en la tecnología de impresión 3D (41). Sin embargo, es posible que se requiera más investigación clínica para evaluar de manera integral los beneficios clínicos del uso de técnicas guiadas emergentes.
Declaración de disponibilidad de datos
Las contribuciones originales presentadas en el estudio están incluidas en el artículo/Material complementario, las consultas posteriores pueden dirigirse a los autores correspondientes.
Declaración ética
El estudio en animales fue aprobado por el protocolo de uso animal ha sido revisado y aprobado por el Comité de Ética y Bienestar Animal de la Universidad Agrícola de Sichuan con el número de aprobación 20220202. El estudio se llevó a cabo de acuerdo con la legislación local y los requisitos institucionales.
Contribuciones de los autores
JP: Curación de datos, Análisis formal, Metodología, Visualización, Redacción – borrador original. JY: Software, Validación, Redacción – revisión y edición. RL: Curación de datos, Análisis formal, Redacción – borrador original. NS: Redacción – revisión y edición. ZhZ: Escritura – revisión y edición. GP: Redacción – revisión y edición. KZ: Redacción – revisión y edición. CZ: Adquisición de fondos, Recursos, Supervisión, Redacción – revisión y edición. MZ: Supervisión, Redacción, revisión y edición, Adquisición de fondos, Recursos. ZiZ: Conceptualización, Investigación, Supervisión, Escritura – Revisión y Edición.
Financiación
El (los) autor(es) declara(n) que se recibió apoyo financiero para la investigación, autoría y/o publicación de este artículo. Esta investigación fue financiada por el programa de Ciencia y Tecnología de la Administración de Productos Médicos de Sichuan subvención número 2024010; La Fundación de Ciencias Naturales de la Provincia de Sichuan (24NSFSC1281).
Reconocimientos
Nos gustaría agradecer el apoyo de la Plataforma de Intercambio de Recursos Científicos y Tecnológicos de Sichuan del Servicio de Tecnología Experimental y Cría de Perros Beagle.
Conflicto de intereses
Los autores declaran que la investigación se llevó a cabo en ausencia de relaciones comerciales o financieras que pudieran interpretarse como un posible conflicto de intereses.
Nota del editor
Todas las afirmaciones expresadas en este artículo son únicamente las de los autores y no representan necesariamente las de sus organizaciones afiliadas, ni las del editor, los editores y los revisores. Cualquier producto que pueda ser evaluado en este artículo, o afirmación que pueda hacer su fabricante, no está garantizado ni respaldado por el editor.
Material complementario
El material complementario para este artículo se puede encontrar en línea en: https://www.frontiersin.org/articles/10.3389/fvets.2024.1481612/full#supplementary-material
Referencias
1. Soukup, JW, Jeffery, J, Hetzel, SJ, Ploeg, HL y Henak, CR. Cuantificación morfológica del diente canino maxilar en el perro doméstico (Canis Lupus Familiaris). Ann Anat. (2023) 246:152041. doi: 10.1016/j.aanat.2022.152041
Resumen de PubMed | Texto completo de Crossref | Google Académico
2. Siqueira, JF Jr y Rôças, IN. Estado actual y direcciones futuras: microbiología de las infecciones endodónticas. Int Endod J. (2022) 55:512–30. doi: 10.1111/iej.13677
Resumen de PubMed | Texto completo de Crossref | Google Académico
3. Kwon, D, Yoo, DS, Kang, SS, Jang, K y Kim, SE. Resultados de los tratamientos de conducto radicular con tres selladores diferentes para 120 dientes premolares maxilares fracturados en perros de tamaño pequeño a mediano. Frente Vet Sci. (2024) 11:1382645. doi: 10.3389/fvets.2024.1382645
Resumen de PubMed | Texto completo de Crossref | Google Académico
4. Jucan, MM, Coffman, C, Mauldin, GE y Fink, LA. Resultado del tratamiento endodóntico de 45 dientes incisivos en perros determinado por radiografía intraoral. J Vet Dent. (2023) 40:338–46. doi: 10.1177/08987564231201063
Resumen de PubMed | Texto completo de Crossref | Google Académico
5. Li, M, Wang, G, Zhu, F, Jiang, H, Yang, Y, Cheng, R, et al. Aplicación de plantillas personalizadas en el manejo mínimamente invasivo de dens invaginatus coronales: reporte de dos casos. BMC Salud Bucal. (2024) 22:24–592. doi: 10.1186/s12903-024-04377-5
Resumen de PubMed | Texto completo de Crossref | Google Académico
6. Touré, B, Faye, B, Kane, AW, Lo, CM, Niang, B, y Boucher, Y. Análisis de las razones para la extracción de dientes tratados endodónticamente: un estudio prospectivo. J Endod. (2011) 37:1512–5. doi: 10.1016/j.joen.2011.07.002
Resumen de PubMed | Texto completo de Crossref | Google Académico
7. Liu, R, Yang, J, Zhu, Y, Zhou, X, Zhou, Q, Liang, T, et al. Un modelo de predicción para la implantación dental adecuada en la región de los premolares mandibulares caninos basado en el análisis de elementos finitos. BMC Vet Res. (2024) 20:353. doi: 10.1186/s12917-024-04221-6
Resumen de PubMed | Texto completo de Crossref | Google Académico
8. Long, H, Zhang, H, Deng, L, Li, C, Zhu, Y, Ling, S, et al. Biomecánica de la implantación dental en el panda gigante (Ailuropoda Melanoleuca): estudio comparativo mediante análisis de elementos finitos. J Vet Dent. (2024):8987564241265420. doi: 10.1177/08987564241265420
Resumen de PubMed | Texto completo de Crossref | Google Académico
9. Wang, Y, Chen, J, Qin, S, Han, X, Liao, L, Sima, X, et al. Una evaluación in vivo de alineadores transparentes para una fuerza y movimiento ortodónticos óptimos para determinar la estadificación de los alineadores de alta eficacia y amigables con la periodoncia. Heliyon. (2023) 9:E15317. doi: 10.1016/j.heliyon.2023.e15317
Resumen de PubMed | Texto completo de Crossref | Google Académico
10. Connert, T, Weiger, R, y Krastl, G. Estado presente y direcciones futuras: endodoncia guiada. Int Endod J. (2022) 55 Supl 4:995–1002. doi: 10.1111/iej.13687
Resumen de PubMed | Texto completo de Crossref | Google Académico
11. Tú, YH, Zhao, D, Huang, QB, y Lu, JZ. Aplicación del software micics medical 21.0 en la sublobectomía anatómica toracoscópica. Minerva Surg. (2022) 77:221–8. doi: 10.23736/s2724-5691.21.08927-9
Resumen de PubMed | Texto completo de Crossref | Google Académico
12. Maneiro Lojo, J, Alonso Pérez-Barquero, J, García-Sala Bonmatí, F, Agustín-Panadero, R, Yilmaz, B, y Revilla-León, M. Influencia de la orientación de la impresión en la exactitud (veracidad y precisión) de moldes de diagnóstico fabricados con una impresora de polímero de luz diurna. J Prótesis Dent. (2023). doi: 10.1016/j.prosdent.2023.01.033
Resumen de PubMed | Texto completo de Crossref | Google Académico
13. Shapi’I, A, Sulaiman, R, Hasan, M, Kassim, A, y HA, H. Aplicaciones del diseño asistido por ordenador (cad) en la tecnología de imágenes médicas. Int j adv sci eng inform technol. (2011) 1:698–701. doi: 10.18517/ijaseit.1.6.140
14. Kuralt, M, Gašperšič, R, y Fidler, A. 3d planificación del tratamiento asistido por ordenador en periodoncia: un enfoque novedoso para la evaluación y visualización del grosor de los tejidos blandos. J esthet restor dent. (2020) 32:457–62. doi: 10.1111/jerd.12614
Resumen de PubMed | Texto completo de Crossref | Google Académico
15. Maravić, T, Vasiljević, D, Kantardžić, I, Lainović, T, Lužanin, O, y Blažić, L. Influencia de los procedimientos restauradores en los premolares tratados endodónticamente: análisis de elementos finitos de un modelo tridimensional basado en tomografía computarizada. Dent Mater J. (2018) 37:493–500. doi: 10.4012/dmj.2017-064
Resumen de PubMed | Texto completo de Crossref | Google Académico
16. Parvan, M, Khaghaninejad, MS, y Karimi, MT. La comparación entre varios métodos de reconstrucción mandibular basados en el análisis de elementos finitos. Proc inst mech eng h. (2024) 238:423–9. doi: 10.1177/09544119241232282
Resumen de PubMed | Texto completo de Crossref | Google Académico
17. Qin, SF, Wright, DK y Jordanov, IN. Del boceto on-line a la geometría 2D y 3D: un sistema basado en el conocimiento difuso[J]. Diseño asistido por ordenador, (2000) 32. doi: 10.1016/S0010-4485(00)00078-6
18. Bhuva, B, e Ikram, O. Complicaciones en endodoncia. Prim Dent J. (2020) 9:52–8. doi: 10.1177/2050168420963306
19. Lee, DB, Arzi, B, Kass, PH y Verstraete, FJM. Resultado radiográfico del tratamiento de conducto radicular en perros: 281 dientes en 204 perros (2001-2018). J am vet med assoc. (2022) 260:535–42. doi: 10.2460/javma.21.03.0127
Resumen de PubMed | Texto completo de Crossref | Google Académico
20. Kuntsi-Vaattovaara, H, Verstraete, FJ y Kass, PH. Resultados del tratamiento de conducto radicular en perros: 127 casos (1995-2000). J am vet med assoc. (2002) 220:775–80. doi: 10.2460/javma.2002.220.775
Resumen de PubMed | Texto completo de Crossref | Google Académico
21. Olcay, K, Ataoglu, H y Belli, S. Evaluación de factores relacionados en el fracaso de los dientes tratados endodónticamente: un estudio transversal. J Endod. (2018) 44:38–45. doi: 10.1016/j.joen.2017.08.029
Resumen de PubMed | Texto completo de Crossref | Google Académico
22. Mikrogeorgis, G, Eirinaki, E, Kapralos, V, Koutroulis, A, Lyroudia, K y Pitas, I. Diagnóstico de fracturas verticales de raíces en dientes tratados endodónticamente Utilizando radiografía digital por sustracción: un informe de serie de casos. Aust Endod J. (2018) 44:286–91. doi: 10.1111/aej.12240
Resumen de PubMed | Texto completo de Crossref | Google Académico
23. Zehnder, MS, Connert, T, Weiger, R, Krastl, G y Kühl, S. Endodoncia guiada: precisión de un método novedoso para la preparación guiada de la cavidad de acceso y la ubicación del conducto radicular. Int Endod J. (2016) 49:966–72. doi: 10.1111/iej.12544
Resumen de PubMed | Texto completo de Crossref | Google Académico
24. Buchgreitz, J, Buchgreitz, M, y Bjørndal, L. Endodoncia guiada modificada para el tratamiento de molares mediante el uso de una técnica de guía intracoronal. J Endod. (2019) 45:818–23. doi: 10.1016/j.joen.2019.03.010
Resumen de PubMed | Texto completo de Crossref | Google Académico
25. Connert, T, Zehnder, MS, Amato, M, Weiger, R, Kühl, S y Krastl, G. Endodoncia microguiada: un método para lograr la preparación de la cavidad de acceso mínimamente invasiva y la ubicación del conducto radicular en incisivos mandibulares utilizando una nueva técnica guiada por computadora. Int Endod J. (2018) 51:247–55. doi: 10.1111/iej.12809
Resumen de PubMed | Texto completo de Crossref | Google Académico
26. Khare, MV, Sivarajan, RK y Venkatesh, V. Evaluación comparativa de tres técnicas de preparación de cavidades de acceso en la instrumentación de conductos radiculares mediante Micro-Ct: un estudio in vitro. Cureus. (2024) 16:E66424. doi: 10.7759/cureus.66424
Resumen de PubMed | Texto completo de Crossref | Google Académico
27. Jain, SD, Carrico, CK y Bermanis, I. Precisión tridimensional de la tecnología de navegación dinámica en la localización de canales calcificados. J Endod. (2020) 46:839–45. doi: 10.1016/j.joen.2020.03.014
Resumen de PubMed | Texto completo de Crossref | Google Académico
28. Chong, BS, Dhesi, M y Makdissi, J. Navegación dinámica asistida por computadora: un método novedoso para la endodoncia guiada. Quintessence Int. (2019) 50:196–202. doi: 10.3290/j.qi.a41921
Resumen de PubMed | Texto completo de Crossref | Google Académico
29. Torres, A, Boelen, GJ, Lambrechts, P, Pedano, MS y Jacobs, R. Navegación dinámica: un estudio de laboratorio sobre la precisión y el uso potencial del tratamiento guiado del conducto radicular. Int Endod J. (2021) 54:1659–67. doi: 10.1111/iej.13563
30. Hongyu, T, y Ziyi, Z. Diseño y simulación basados en pro/E para una plataforma elevadora hidráulica tipo tijera. Proc Ing. (2011) 16:772–81. doi: 10.1016/j.proeng.2011.08.1153
31. Lanis, A, y Del Canto, OÁ. La combinación de escáneres digitales de superficie y tecnología de tomografía computarizada de haz cónico para la cirugía guiada de implantes utilizando el software de estudio de implantes 3shape: un informe de historia de caso. Int J Prostodonte. (2015) 28:169–78. doi: 10.11607/ijp.4148
Resumen de PubMed | Texto completo de Crossref | Google Académico
32. Xu, Z, Zhou, L, Han, B, Wu, S, Xiao, Y, Zhang, S, et al. Precisión de la colocación de implantes dentales mediante diferentes sistemas dinámicos de navegación y robotizados: un estudio in vitro. NPJ Digit Med. (2024) 7:182. doi: 10.1038/s41746-024-01178-6
Resumen de PubMed | Texto completo de Crossref | Google Académico
33. Andrés-Cano, P, Calvo-Haro, JA, Fillat-Gomà, F, Andrés-Cano, I, y Pérez-Mañanes, R. El papel del cirujano ortopédico en la impresión 3D: aplicaciones actuales y cuestiones legales para una medicina personalizada. Rev esp circ ortop traumatol (Engl ed). (2021) 65:138–51. doi: 10.1016/j.recot.2020.06.014
Resumen de PubMed | Texto completo de Crossref | Google Académico
34. Krishan, R, Paqué, F, Ossareh, A, Kishen, A, Dao, T y Friedman, S. Impactos de la cavidad endodóntica conservadora en la instrumentación del conducto radicular evaluada y la resistencia a la fractura en incisivos, premolares y molares. J Endod. (2014) 40:1160–6. doi: 10.1016/j.joen.2013.12.012
Resumen de PubMed | Texto completo de Crossref | Google Académico
35. Plotino, G, Grande, NM, Isufi, A, Ioppolo, P, Pedullà, E, Bedini, R, et al. Resistencia a la fractura de dientes tratados endodónticamente con diferentes diseños de cavidades de acceso. J Endod. (2017) 43:995–1000. doi: 10.1016/j.joen.2017.01.022
Resumen de PubMed | Texto completo de Crossref | Google Académico
36. Connert, T, Krug, R, Eggmann, F, Emsermann, I, ElAyouti, A, Weiger, R, et al. Endodoncia guiada versus preparación convencional de la cavidad de acceso: un estudio comparativo sobre la pérdida de sustancia utilizando dientes impresos en 3 dimensiones. J Endod. (2019) 45:327–31. doi: 10.1016/j.joen.2018.11.006
Resumen de PubMed | Texto completo de Crossref | Google Académico
37. Nagendrababu, V, Chong, BS, McCabe, P, Shah, PK, Priya, E, Jayaraman, J, et al. Precio 2020 pautas para la presentación de informes de casos en endodoncia: explicación y elaboración. Int Endod J. (2020) 53:922–47. doi: 10.1111/iej.13300
Resumen de PubMed | Texto completo de Crossref | Google Académico
38. Gonçalves, WF, Garcia, L, Vieira-Schuldt, DP, Bortoluzzi, EA, Dias-Júnior, LCL, y Teixeira, CDS. Endodoncia guiada en conductos radiculares con acceso complejo: dos reportes de casos. Braz Dent J. (2021) 32:115–23. doi: 10.1590/0103-6440202104537
Resumen de PubMed | Texto completo de Crossref | Google Académico
39. Jidewar, NP, Chandak, M, Sarangi, S, Agrawal, P, Suryawanshi, T, Naladkar, KM, et al. El manejo de una configuración de canal en forma de C1 en un segundo molar mandibular. Cureus. (2024) 16:E66728. doi: 10.7759/cureus.66728
Resumen de PubMed | Texto completo de Crossref | Google Académico
40. Bittner, SM, Smith, BT, Díaz-Gómez, L, Hudgins, CD, Melchiorri, AJ, Scott, DW, et al. Fabricación y caracterización mecánica de andamios verticales uniformes y degradados impresos en 3D para la ingeniería de tejidos óseos y osteocondrales. Acta Biomater. (2019) 90:37–48. doi: 10.1016/j.actbio.2019.03.041
Resumen de PubMed | Texto completo de Crossref | Google Académico
41. Abdelhafeez, MM . Aplicaciones del análisis de elementos finitos en endodoncia: una revisión sistemática y metaanálisis. J Pharm Bioallied Sci. (2024) 16:S1977-80. doi: 10.4103/jpbs.jpbs_393_24
Resumen de PubMed | Texto completo de Crossref | Google Académico
Palabras clave: endodoncia guiada, análisis de elementos finitos, impresión 3D, endodoncia, diseño asistido por ordenador
Cita: Peng J, Yang J, Liu R, Liu H, Zhong Z, Peng G, Zhang K, Zheng C, Zhang M y Zhou Z (2024) Evaluación del concepto de endodoncia guiada por impresión tridimensional en el perro. Frente. Vet. Sci. 11:1481612. doi: 10.3389/fvets.2024.1481612
Editado por:
Gerhard Steenkamp, Universidad de Pretoria, Sudáfrica
Revisado por:
Shane White, Universidad de California, Los Ángeles, Estados
Unidos Casper Jonker, Universidad de Plymouth, Reino Unido
Derechos de autor © 2024 Peng, Yang, Liu, Liu, Zhong, Peng, Zhang, Zheng, Zhang y Zhou. Este es un artículo de acceso abierto distribuido bajo los términos de la Licencia Creative Commons Attribution License (CC BY).
*Correspondencia: Chengli Zheng, zcl19861106@163.com; Ming Zhang, zhangming@sicau.edu.cn; Ziyao Zhou, zzhou@sicau.edu.cn
†Estos autores han contribuido igualmente a este trabajo
Renuncia: Todas las afirmaciones expresadas en este artículo son únicamente las de los autores y no representan necesariamente a las de sus organizaciones afiliadas, o las del editor, de los editores y de los revisores. Cualquier producto que puede ser evaluada en este artículo o afirmación que puede ser hecha por su El fabricante no está garantizado ni respaldado por el editor.
Date de alta y recibe nuestro 👉🏼 Diario Digital AXÓN INFORMAVET ONE HEALTH
Date de alta y recibe nuestro 👉🏼 Boletín Digital de Foro Agro Ganadero
Noticias animales de compañía
Noticias animales de producción
Trabajos técnicos animales de producción
Trabajos técnicos animales de compañía