
Las perturbaciones mecánicas externas desafían la estabilidad postural en perros
Las perturbaciones mecánicas externas desafían la estabilidad postural en perros





 Alejandro Tichy3
Alejandro Tichy3 
- 1Departamento de Animales de Compañía y Caballos, Clínica Universitaria para Animales Pequeños, Cirugía de Pequeños Animales, Sección de Terapia Física, Universidad de Medicina Veterinaria, Viena, Austria
- 2Departamento de Animales de Compañía y Caballos, Clínica Universitaria para Caballos, Grupo de Ciencias del Movimiento, Universidad de Medicina Veterinaria, Viena, Austria
- 3Departamento de Ciencias Biomédicas, Plataforma de Bioinformática y Bioestadística, Universidad de Medicina Veterinaria, Viena, Austria
Este estudio tuvo como objetivo explorar el efecto de las perturbaciones mecánicas externas sobre la estabilidad postural (PS) en perros que utilizan el centro de presión corporal (COP). Trece perros adultos sanos fueron incluidos en este estudio. PS se probó durante la parada silenciosa en una placa de medición de presión. Las condiciones incluyeron una medición estándar de pie y perturbaciones mecánicas externas realizadas utilizando seis configuraciones en una plataforma de entrenamiento motorizada con diferentes intensidades de velocidad y amplitud. Las condiciones de medición se compararon utilizando modelos lineales de efectos mixtos, seguidos de comparaciones múltiples utilizando el procedimiento de corrección alfa de Sidak. En comparación con la medición de pie, las perturbaciones mecánicas externas resultaron en un aumento significativo en casi todos los parámetros de COP, lo que indica un desafío para el PS. Además, un aumento en la amplitud tuvo un efecto mayor que un aumento en la velocidad, mientras que la combinación de las intensidades más altas de amplitud y velocidad no fue bien tolerada por los perros. El desplazamiento mediolateral de la COP fue significativamente mayor que el desplazamiento craneocaudal de la COP durante la medición de pie y las condiciones con una amplitud pequeña, mientras que no se observaron diferencias significativas durante los ajustes con una amplitud aumentada. Hasta donde sabemos, este es el primer estudio que demuestra los efectos de un dispositivo de entrenamiento del equilibrio en perros. Por lo tanto, la intensidad de los programas de entrenamiento en plataformas motorizadas o dispositivos similares puede ser controlada por la amplitud de oscilación de la plataforma.
1. Introducción
La estabilidad postural (PS) es el acto de mantener, lograr o restablecer el equilibrio durante una postura o actividad (1). Esto se logra a través de interacciones entre los sistemas visual, somatosensorial y vestibular del sistema nervioso central (2). La estabilización corporal resulta de la transmisión de información del sistema nervioso central al sistema musculoesquelético (1).
Un parámetro típico utilizado para evaluar la PS en pacientes humanos es el centro de presión (COP) (3-9), que se ha utilizado recientemente en medicina veterinaria (10-31). El COP es la ubicación del vector instantáneo de las fuerzas de reacción del suelo y muestra la trayectoria del centro de masa del cuerpo. Durante el contacto con el suelo, la posición del centro de masa, y por lo tanto el COP, cambia continuamente, dando como resultado una trayectoria COP (9). La COP se mueve dentro de la base de apoyo del cuerpo. El equilibrio se mantiene mediante movimientos rápidos de COP para mantener el centro de masa dentro de la base de apoyo (32, 33). Si el COP excede la base de apoyo, se toma una medida de protección para evitar caídas (34). Por lo tanto, la capacidad de restablecer el equilibrio está directamente influenciada por la posición de la COP antes de la perturbación (35). El COP se puede medir fácilmente utilizando placas de medición de fuerza y presión (10-20).
Las evaluaciones previas en medicina veterinaria se realizaron durante la posturografía estática, es decir, durante la parada tranquila con (11-16, 22, 24, 31) y sin PS desafiante (23), y durante el análisis de la marcha en locomoción normal (10, 20, 21) y diferentes tareas (17, 18). Además, se puede medir el COP del cuerpo (11, 14-16, 22, 23, 31) y el que está dentro de las patas (10, 12, 13, 17-20). Algunas mediciones se realizan con el animal parado en una placa con todos los pies para calcular el COP corporal (11, 16, 22, 23, 31), mientras que otros lo evalúan solo entre las extremidades anteriores (11, 14, 15, 31) o posteriores (11, 31). Los parámetros COP se calculan en función de la ruta COP. Durante la posturografía, se describen comúnmente los siguientes parámetros de COP corporales: El desplazamiento de la COP en direcciones mediolaterales (COP-MedLat) y craneocaudales (COP-CranCaud); la superficie de apoyo, que es el área determinada por una elipse que contiene el 90% de los puntos de la trayectoria COP; 11) la velocidad de la COP; la longitud del estatoquinesiograma; y longitud en función de superficie. La longitud del estatoquinesiograma es la longitud de la línea que une los puntos de la trayectoria COP. Es una medida del esfuerzo necesario para mantener una posición erguida y, por lo tanto, mide la eficacia del sistema postural (36). La longitud en la función de superficie es la correlación entre la longitud COP y su superficie. Proporciona información sobre la precisión del PS y el esfuerzo realizado por el sujeto para mantener una posición erguida (15, 37). Un aumento en los parámetros de COP se asocia con PS deteriorado (16, 22, 23).
Durante la medición estándar de pie, la investigación veterinaria se ha centrado en el cuerpo COP de caballos sanos (28, 31) y cojos (15), potros (22), seniles (16, 24) y cojos (11, 14), y el COP dentro de las patas de perros cojos (12, 13). En caballos, el COP-MedLat fue significativamente más grande que el COP-CranCaud durante la medición de pie de las extremidades anteriores. Basándose en sugerencias en medicina humana, Pitti et al. (15) propusieron que el diámetro craneocaudal más grande de la base de apoyo en caballos es responsable de la estabilidad más profunda en la dirección craneocaudal. Si bien aún no se han realizado comparaciones similares en perros, se ha propuesto que la superficie de soporte tiene un diámetro más amplio en la dirección mediolateral que en la dirección craneocaudal durante las mediciones entre las extremidades anteriores (11, 14) y posteriores (11). Hasta este momento, según el conocimiento de los autores, no se han realizado investigaciones sobre la influencia de diferentes conformaciones corporales en la superficie de soporte. Sin embargo, los parámetros COP están significativamente influenciados por el peso, la altura y la longitud en perros (16). El aumento del desplazamiento de COP corporal durante la posturografía estática se asocia con la edad y el estado de salud de los animales. En potros, (22), los aumentos en COP-MedLat y COP-CranCaud se atribuyeron a un PS poco desarrollado. Se han descrito patrones similares de parámetros COP en perros seniles. Una vez más, estos resultados se discuten como signos de disminución de la PS (16, 24). Este hallazgo es consistente con los resultados de investigaciones médicas humanas previas. Los niños y los ancianos muestran una mayor superficie de apoyo y, por lo tanto, una disminución de la PS en comparación con los adultos sanos (38). Además, los autores sugirieron que las diferencias significativas entre los perros seniles y los más jóvenes podrían ser el resultado de dolor articular y otras comorbilidades asociadas con el envejecimiento (16), como se describe en perros con osteoartrosis. La cubartrosis y la gonartrosis resultan en un aumento significativo de COP-MedLat, COP-CranCaud y superficie de soporte en comparación con un grupo de control (11, 14). Del mismo modo, la investigación médica en humanos ha revelado un efecto negativo del dolor inducido experimentalmente sobre la estabilidad postural en adultos sanos (39).
Las pruebas de equilibrio dinámico desafían la estabilidad postural de pie durante perturbaciones externas o condiciones dinámicas, incluidos estímulos mecánicos, sensoriales o combinados (40). Aunque la pérdida de información visual en caballos resulta en un aumento significativo en COP-MedLat, COP-CranCaud y velocidad mediolateral de COP (23), las pruebas de equilibrio dinámico durante la investigación de los parámetros de COP aún no se han realizado en caninos. Perturbaciones mecánicas externas, incluyendo diferentes superficies (41–43), tirones de cintura (32, 35), plataformas mecánicas (44–49) y estrechamiento de la base de apoyo con una sola pierna (6, 41, 50–52) y una postura en tándem (de pie en posición de talón a dedo del pie) (53–55), se usan comúnmente en la investigación médica humana para desafiar la PS. El aumento de la base de apoyo por una postura más amplia resultó en mejoras en el rendimiento del equilibrio, principalmente en COP-MedLat en adultos sanos (56), mientras que la postura de una sola pierna aumentó el total de COP-MedLat, COP-CranCaud y COP-CranCaud medio (52). En pacientes con roturas del ligamento cruzado anterior, la postura de una sola pierna resultó en un aumento significativo en el total de COP-MedLat en comparación con el grupo control (6). Además, la base funcional de apoyo, definida como el área utilizada para mantener el equilibrio, disminuye durante el proceso de envejecimiento. Por lo tanto, una disminución en la base funcional de apoyo resulta en una capacidad deteriorada para mantener o restablecer el equilibrio (57, 58). Usando una plataforma motorizada, los investigadores encontraron un aumento significativo durante las perturbaciones sinusoidales a una amplitud de 5 ° a una frecuencia alta (0.50 Hz) en comparación con una frecuencia baja (0.25 Hz) en la longitud del estatoquinesiograma, mientras que la frecuencia no tuvo un efecto significativo en COP-MedLat y COP-CranCaud. Sin embargo, se observó una fuerte correlación entre la longitud del estatoquinesiograma y COP-MedLat en ambas condiciones (48). Además, los participantes de control y los pacientes con enfermedad de Parkinson fueron menos desafiados por perturbaciones anteriores-posteriores que por perturbaciones laterales, y los pacientes enfermos mostraron una estrategia postural menos eficiente (49).
Como se describió anteriormente, se han descrito muchos enfoques para desafiar la PS en humanos, la mayoría de los cuales no se pueden aplicar a los animales. Similar a la postura de una sola pierna, las pruebas de pie de tres patas se usan comúnmente para evaluar la fuerza y el equilibrio en perros (59). Sin embargo, esta prueba está sujeta a una alta variabilidad entre los profesionales (60), y la medición de pie es difícil de realizar durante un período suficiente (16). Por lo tanto, esta condición de prueba puede carecer de validez y ser difícil de realizar en animales ortopédicos y neurológicamente enfermos. Se han propuesto pruebas dinámicas, como caminar por la Figura 8 y pasar por encima de los obstáculos del carril Cavaletti, para probar el equilibrio dinámico y la conciencia espacial con baja variabilidad entre pacientes y profesionales (60). Esto último condujo a diferencias significativas en los parámetros de COP en comparación con la marcha normal (17). Sin embargo, la posturografía estática durante perturbaciones externas no se ha abordado en la literatura.
Las plataformas mecánicas se pueden utilizar para medir el PS en animales en condiciones difíciles. La dificultad se puede ajustar al nivel de condición física del animal cambiando la velocidad y la angulación a un plano horizontal (amplitud) de los movimientos hacia arriba y hacia abajo. Estas propiedades permiten la evaluación de PS durante mediciones repetibles en condiciones fijas.
La investigación veterinaria debe centrarse en establecer procedimientos de medición que evalúen la influencia de las perturbaciones externas en el PS en animales sanos y ortopédica o neurológicamente enfermos. Como primer paso hacia la evaluación del efecto de las perturbaciones externas sobre la PS en perros, este estudio tuvo como objetivo evaluar el efecto de las perturbaciones externas en los parámetros de COP en perros sanos en diferentes entornos en una plataforma de entrenamiento motorizada. En el futuro, esto puede servir como una extensión de las mediciones convencionales de las fuerzas de reacción del suelo, que proporcionan información sobre la carga de las extremidades, pero no son adecuadas para describir el balanceo de todo el cuerpo.
Planteamos la hipótesis de que las perturbaciones mecánicas externas desafían la PS en los perros, lo que se refleja en los parámetros COP del cuerpo. Además, los ajustes de amplitud y velocidad más altos de la plataforma motorizada dan como resultado signos de mayor inestabilidad, y un aumento en la amplitud tiene un efecto más fuerte que un aumento en la velocidad.
2. Materiales y métodos
2.1. Declaración ética
Este estudio fue aprobado por el Comité de Ética y Bienestar Animal de la Universidad de Medicina Veterinaria de Viena, de acuerdo con las directrices de la Universidad para «Buenas Prácticas Científicas» (ETK-131/09/2021).
2.2. Animales y criterios de inclusión
El tamaño de la muestra se calculó utilizando G*Power 3.1 basado en los resultados de un estudio piloto (Comité de Ética y Bienestar Animal de la Universidad de Medicina Veterinaria número de aprobación ETK-101/06/2020), que resultó en un total de 10 perros, asumiendo una potencia del 80% y una probabilidad de error tipo I del 5%.
Los perros con afecciones ortopédicas y neurológicas preexistentes o cualquier otra enfermedad que pueda afectar negativamente la PS, como enfermedades del oído interno y visión reducida, fueron excluidos preliminarmente. Otros criterios de inclusión fueron la conformación ectomorfa o mesomorfa, el peso corporal de 15-35 kg y la edad de 2-8 años. Además, el análisis de la marcha se realizó utilizando una placa de medición de presión (FDM Tipo 2; Zebris Medical GmbH, Allgäu, Alemania) para obtener una evaluación objetiva de la cojera (sección 2.3.1). Los índices de simetría (SI) de fuerza vertical máxima (PFz) e impulso vertical (IFz) tenían que estar por debajo del 3%, que es un margen que se ha utilizado repetidamente para distinguir entre perros sanos y cojos (10, 61, 62).
Quince perros fueron incluidos inicialmente en el estudio. Dos perros fueron excluidos debido a su SI para PFz y / o IFz > 3%. La población restante del estudio incluyó siete hembras y seis machos (cuatro razas mixtas, cuatro Border Collies, un pastor australiano, dos Labrador Retrievers, un belga Malinois y un belga Laekenois). La edad media y la masa corporal fueron 4,29 ± 2,15 años (mediana = 4,33, mínima = 2,00, máxima = 7,83) y 22,18 ± 4,14 kg (mediana = 21,50, mínima = 16,70, máxima = 29,00), respectivamente.
2.3. Procedimiento y equipo
2.3.1. Examen inicial
Durante el examen inicial se utilizó una placa de medición de presión de 203 × 54,2 cm (FDM Tipo 2, Zebris Medical GmbH, Allgäu, Alemania). La placa estaba cubierta con una estera de goma negra de 1 mm de espesor compuesta de cloruro de polivinilo para evitar resbalones.
Primero, a los perros se les permitió moverse libremente para aclimatarse a la sala de medición. Las mediciones se realizaron durante la caminata y el trote hasta que se recolectaron al menos cinco pases válidos para cada marcha. Un pase válido se definió como un paseo o trote en el que el perro cruzó el plato sin cambiar de ritmo, girando la cabeza, tirando de la correa o tocando al dueño. La diferencia de velocidad a la que los perros cruzaban la placa tenía que estar dentro de un rango de ±0,3 m/s y una aceleración de ±0,5 m/s2 (63–65).
2.3.2. Posturografía
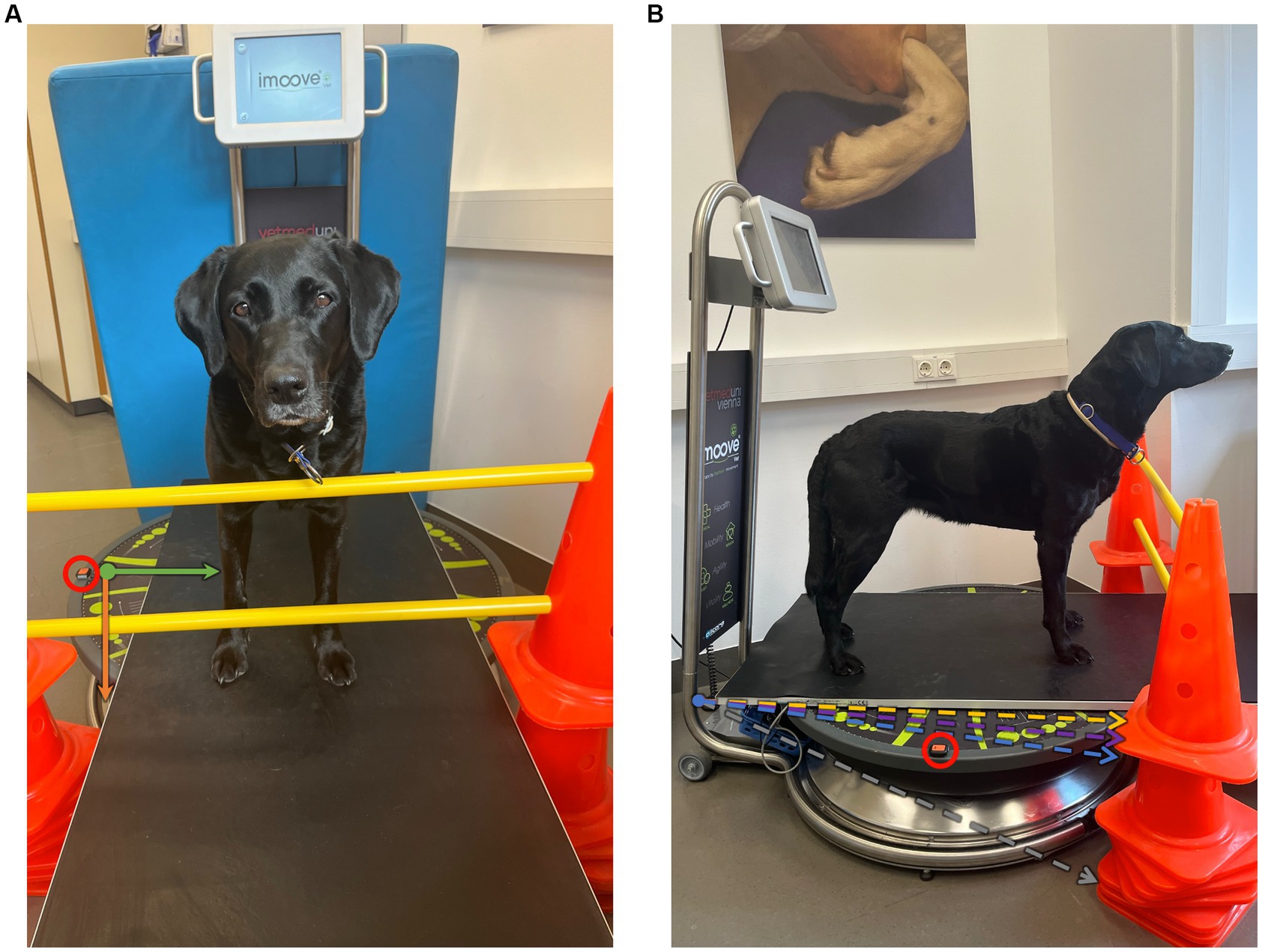
Las mediciones estáticas se realizaron utilizando una placa de medición de presión de 149 × 54,2 cm (FDM-1.5, Zebris Medical GmbH, Allgäu, Alemania), que se colocó en una plataforma motorizada (plataforma Imoove-vet®, Allcare Innovations, 26500 Bourg les Valence, Francia). Esta plataforma utiliza el movimiento elipsférico® que resulta de una combinación de 3 movimientos (rotación, excentricidad e inclinación) dando un contorno elíptico o espiral en 3 dimensiones (66). La placa de medición de presión midió la presión en las patas del perro utilizando 15.360 sensores piezoeléctricos a una frecuencia de muestreo de 100 Hz. La placa estaba cubierta con una estera de goma negra de 1 mm de espesor hecha de cloruro de polivinilo. Como la placa era más larga que la superficie de pie de la plataforma, se utilizaron dos cavaletti para garantizar que los perros no pasaran por el borde. Cada ejecución de medición se filmó con una cámara (Panasonic modelo NV-MX500) para evaluar los movimientos de la cabeza, las extremidades y la cola. El movimiento de la plataforma durante las condiciones de medición se midió en los ejes X, Y y Z utilizando un acelerómetro (sensor Xsens DOT) colocado en el lado derecho de la superficie de pie (Figura 1).
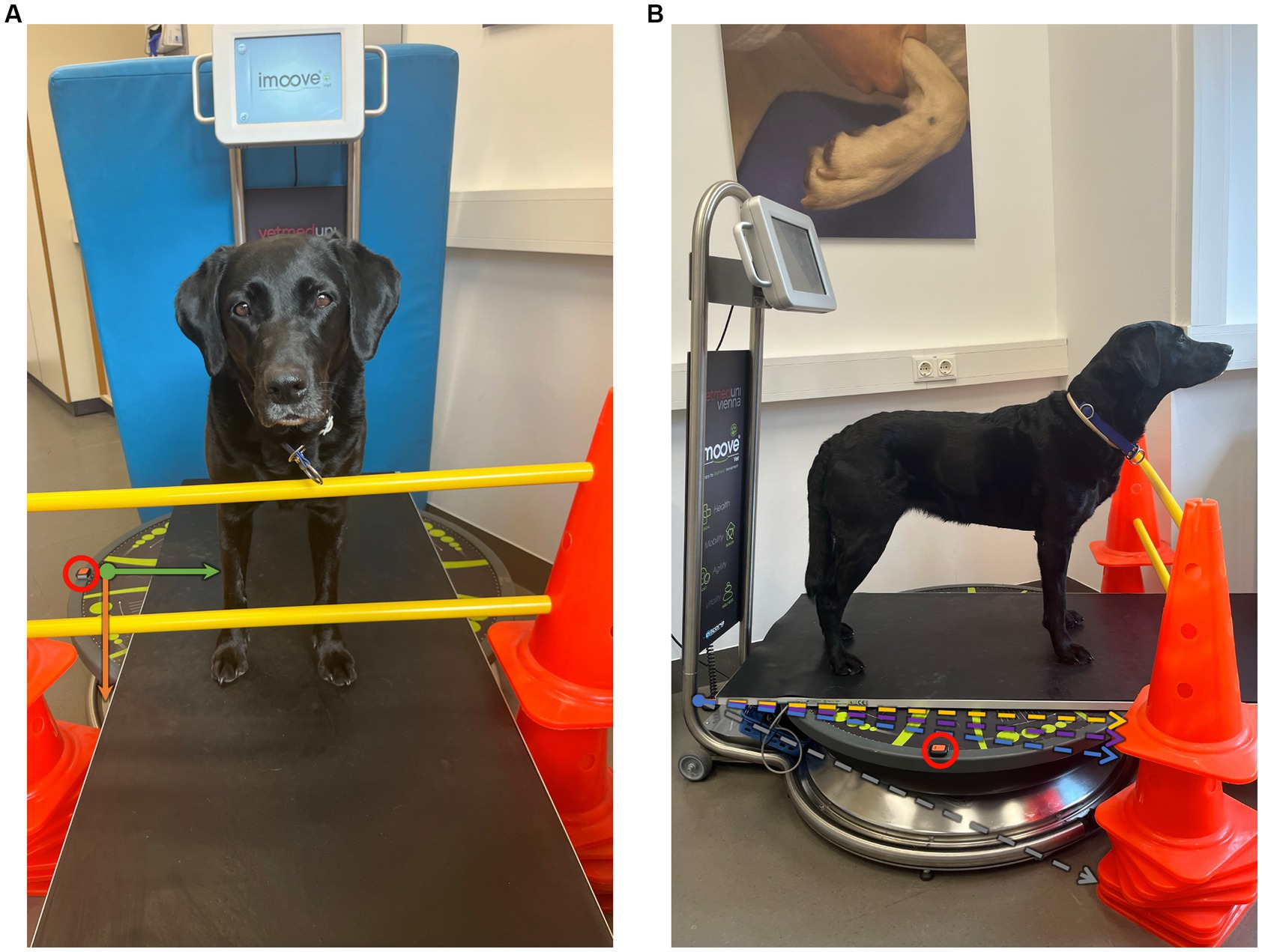 Figura 1. Configuración experimental: (A) vistas frontales y (B) laterales que muestran la plataforma motorizada en posición neutral, que se utiliza para la medición estándar de pie. El acelerómetro se coloca en el lado derecho de la plataforma motorizada (dentro del círculo rojo). El movimiento de la plataforma se mide en los ejes X (verde), Y (naranja) y Z utilizando el sensor Xsens DOT (A). Las amplitudes se ilustran en líneas punteadas a un plano horizontal (B), incluyendo 8° en gris (amplitud máxima del dispositivo); 0.8 ° en amarillo (utilizado durante Velocidad-20%, Velocidad-30%); 1.6° en púrpura (Amplitud-20%, Combinación-20%); y 2,4° (amplitud-30%, combinación-30%).
Figura 1. Configuración experimental: (A) vistas frontales y (B) laterales que muestran la plataforma motorizada en posición neutral, que se utiliza para la medición estándar de pie. El acelerómetro se coloca en el lado derecho de la plataforma motorizada (dentro del círculo rojo). El movimiento de la plataforma se mide en los ejes X (verde), Y (naranja) y Z utilizando el sensor Xsens DOT (A). Las amplitudes se ilustran en líneas punteadas a un plano horizontal (B), incluyendo 8° en gris (amplitud máxima del dispositivo); 0.8 ° en amarillo (utilizado durante Velocidad-20%, Velocidad-30%); 1.6° en púrpura (Amplitud-20%, Combinación-20%); y 2,4° (amplitud-30%, combinación-30%).
El dueño condujo al perro a la placa de medición de presión y lo detuvo en una posición recta y cuadrada. Durante la recolección de datos, el propietario se paró cerca del perro sin contacto físico, para desalentar el movimiento. Todas las condiciones se midieron durante 1 minuto y se repitieron tres veces. Para evitar el efecto de la fatiga en los datos, cada perro fue probado en tres días separados (dos condiciones por día), con al menos 2 días en el medio. Se programó un breve descanso de 1 minuto después de cada medición.
Primero, las mediciones estándar de pie (11-14) se realizaron en la posición neutral de la plataforma motorizada (Figura 1) en todos los días de medición para acostumbrar al perro a la situación y practicar una posición tranquila de pie. Posteriormente, las condiciones de prueba con diferentes configuraciones se realizaron aleatoriamente en una plataforma motorizada. La plataforma permitía una angulación máxima de 8° (100% de amplitud, Figura 1) y una velocidad máxima de 1 Hz o 60 disparos por minuto (rpm; 100% de velocidad) (66). Los ajustes utilizados en este estudio se enumeran en la Tabla 1. Estos incluyeron configuraciones de mayor velocidad y amplitud fija (Velocidad-20%, Velocidad-30%), mayor amplitud y velocidad fija (Amplitud-20%, Amplitud-30%) y una combinación de velocidad y amplitud (Combinación-20%, Combinación-30%). Si un animal mostraba un movimiento excesivo de la pata o la cabeza durante una condición, la medición se suspendía y se etiquetaba como no bien tolerada por el perro.
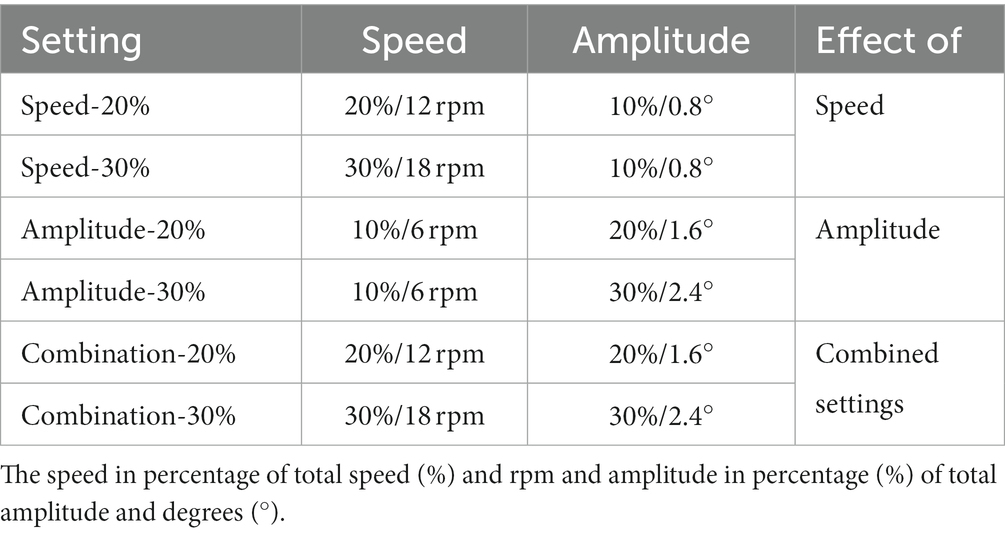 Tabla 1. Resumen de las condiciones de medición.
Tabla 1. Resumen de las condiciones de medición.
La plataforma motorizada mostró un movimiento sinusoidal consistente en las direcciones craneocaudal y laterolateral (Figura 2).
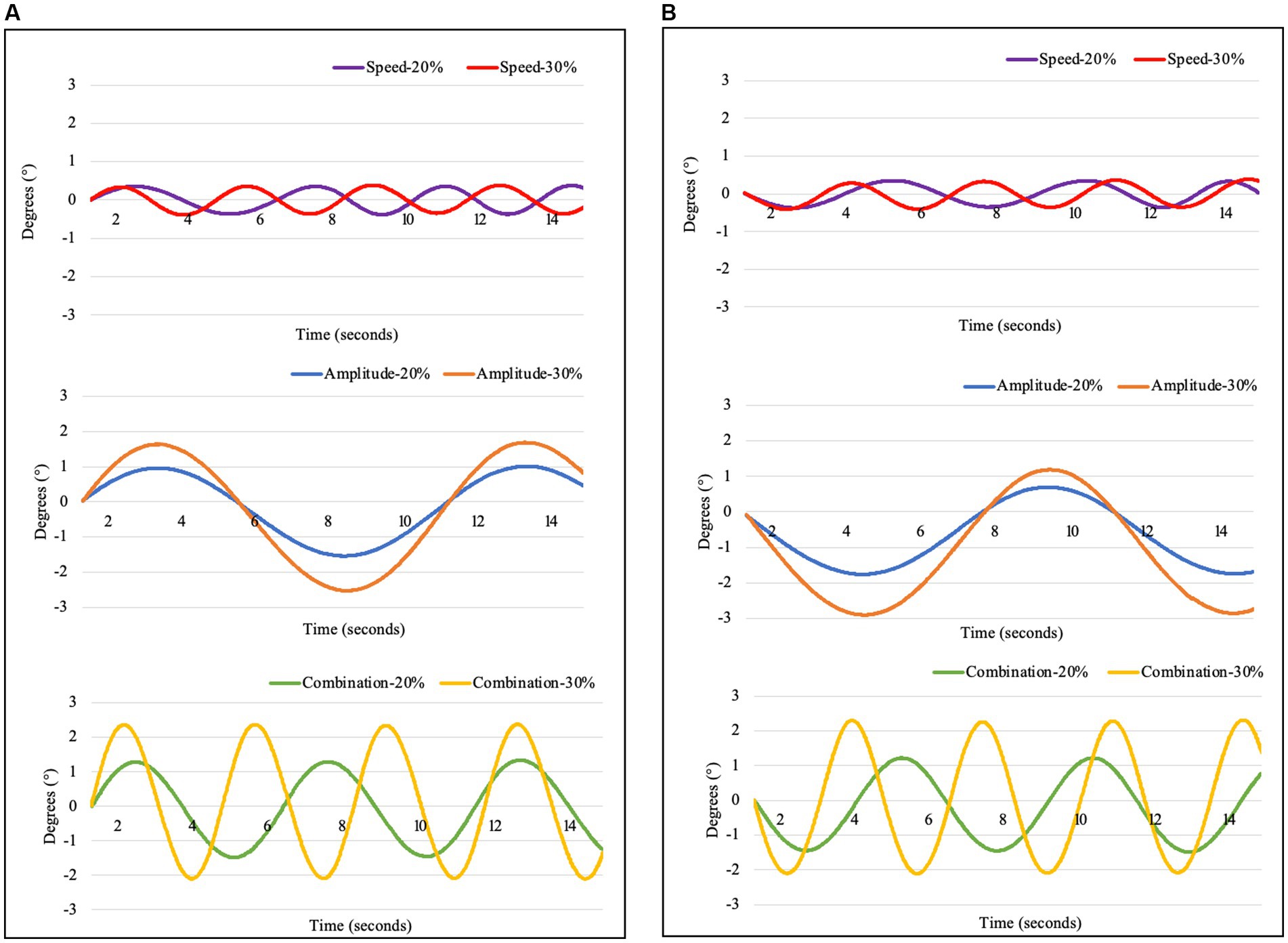 Figura 2. Movimiento de la plataforma, medido con un sensor Xsens DOT en (A) direcciones laterolateral (eje X) y (B) craneocaudal (eje Y) durante los ajustes investigados, incluyendo Velocidad-20% (púrpura): Velocidad 20%, Amplitud 10%; Velocidad-30% (rojo): Velocidad 30%, Amplitud 10%; Amplitud-20% (azul): Velocidad 10%, Amplitud 20%; Amplitud-30% (naranja): Velocidad 10%, Amplitud 30%; Combinación-20% (verde): Velocidad 20%, Amplitud 20%; y Combinación-30% (amarillo): Velocidad 30%, Amplitud 30%.
Figura 2. Movimiento de la plataforma, medido con un sensor Xsens DOT en (A) direcciones laterolateral (eje X) y (B) craneocaudal (eje Y) durante los ajustes investigados, incluyendo Velocidad-20% (púrpura): Velocidad 20%, Amplitud 10%; Velocidad-30% (rojo): Velocidad 30%, Amplitud 10%; Amplitud-20% (azul): Velocidad 10%, Amplitud 20%; Amplitud-30% (naranja): Velocidad 10%, Amplitud 30%; Combinación-20% (verde): Velocidad 20%, Amplitud 20%; y Combinación-30% (amarillo): Velocidad 30%, Amplitud 30%.
2.4. Análisis de datos
Se utilizó un analizador de presión de software personalizado (Michael Schwanda, versión 4.8.5.0) para el análisis de datos, que luego se exportó a Microsoft Excel 2016. Las huellas de las patas se asignaron manualmente a las extremidades correspondientes. De cada medición de 1 minuto, se seleccionó un período válido de 20 s, que indica que no hay movimientos de la cabeza o las patas y solo movimientos mínimos de la cola. Si no se lograba un período válido continuo, los movimientos de cabeza y pata se recortaban manualmente. Una medición se consideró insuficiente si se seleccionó un período válido de menos de 20 s. Para evaluar los diferentes ajustes, los movimientos tridimensionales en todas las direcciones se incluyeron en los marcos de tiempo seleccionados. Si esto no fue posible, las mediciones fueron excluidas del análisis de los datos.
2.5. Parámetros investigados
Se utilizaron los siguientes parámetros para la evaluación de los criterios de inclusión durante la evaluación de la cojera en caminar y trotar utilizando la placa de medición de presión:donde XFz es el valor medio de la fuerza vertical máxima (PFz) o el impulso vertical (IFz) de los pasos válidos, LLx es la extremidad delantera o posterior izquierda, y RLx es la delantera o trasera derecha; A la simetría perfecta entre las extremidades delanteras o posteriores derecha e izquierda se le asignó un valor de 0%.
• La velocidad media (m/s) y la aceleración (m/s2) se calcularon para la extremidad anterior izquierda sobre la base de los pasos posteriores.
• El índice de simetría (SI) expresado como porcentaje (SI%), se calculó para ambos parámetros (PFz e IFz) de acuerdo con la siguiente ecuación:
Utilizando el cuerpo COP, se evaluaron los siguientes parámetros:
• COP-MedLat: La desviación media en el eje lateral (mm) mide alteraciones en el centro de distribución de la carga másica en el eje sagital, y un desplazamiento menor se asocia con una mejor estabilidad (16, 24).
• COP-CranCaud: Desviación media en el eje craneocaudal (mm); Un desplazamiento más pequeño se asocia con una mejor estabilidad (16, 24).
• Superficie de soporte (mm2): o estatoquinesiograma, el área determinada por una elipse que contiene el 90% de los puntos de la trayectoria COP, mide los cambios en la orientación de un sujeto de pie; Un desplazamiento más pequeño se asocia con una mejor estabilidad (11).
• Longitud del estatokinesiograma (longitud del camino, m): la longitud de la línea que une los puntos de la trayectoria COP, una medida del esfuerzo necesario para mantener una estación vertical; y un parámetro vinculado a la superficie de apoyo, que mide la eficiencia del sistema postural (36). En otras palabras, si la superficie de apoyo es igual, una longitud de estatoquinesiograma más baja indica un menor gasto de energía y, por lo tanto, un PS más eficiente, y un valor más alto indica más inestabilidad (14, 15).
• Longitud en función de la superficie: Correlación entre la longitud del COP y su superficie. Esto proporciona información sobre la precisión del PS y el esfuerzo realizado por el sujeto; Un valor más alto indica una mayor inestabilidad (15, 37).
• Velocidad media (mm/s) de balanceo COP (COP-Speed).
2.6. Análisis estadístico
Todos los análisis estadísticos se realizaron utilizando IBM SPSS v27. Los efectos de diferentes condiciones de medición sobre los parámetros se analizaron utilizando modelos lineales de efectos mixtos en los que las condiciones se agregaron como factores fijos al modelo. La corrección alfa de Sidak se aplicó para múltiples comparaciones. La suposición de una distribución normal se probó mediante la prueba de Shapiro-Wilk. Para todos los análisis, se observó un valor de p <5% (p < 0,05) como significativo.
3. Resultados
3.1. Índice de simetría
Los valores del SI para PFz e IFz durante la marcha y el trote se enumeran en la Tabla 2. Todos los perros incluidos en este estudio tenían un SI de PFz e IFz < 3% durante caminar y trotar.
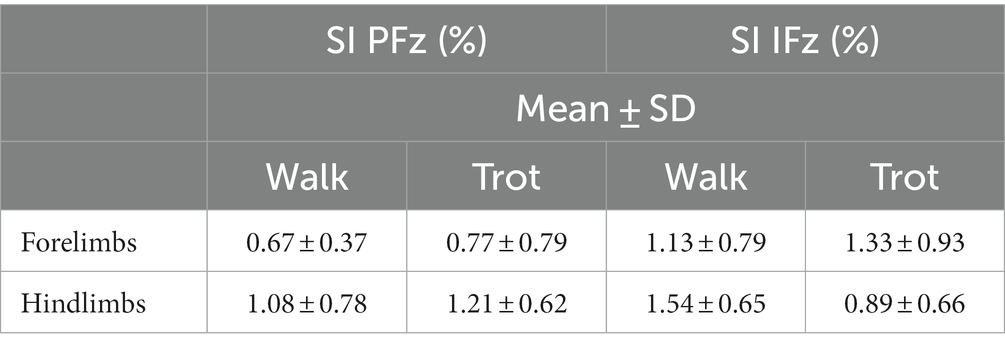 Tabla 2. Índice de simetría (SI) de la fuerza vertical máxima (PFz) y el impulso vertical (IFz) durante el examen inicial en caminar y trotar.
Tabla 2. Índice de simetría (SI) de la fuerza vertical máxima (PFz) y el impulso vertical (IFz) durante el examen inicial en caminar y trotar.
3.2. Mediciones válidas
Todos los perros toleraron condiciones Velocidad-20%, Velocidad-30% y Combinación-20%; Por lo tanto, el análisis de datos incluyó mediciones de 13 perros. Los ajustes de amplitud (Amplitud-20%, Amplitud-30%) no fueron tolerados por un perro, y la condición Combinación-30% condujo a mediciones válidas en 9 de 13 perros.
3.3. Centro de presión
Los principales resultados se muestran en la Figura 3. En comparación con la medición de pie, todas las condiciones probadas condujeron a un aumento significativo en COP-MedLat, COP-CranCaud, superficie de soporte y longitud en la función de la superficie, excepto para Combinación-30% (justo fuera de importancia). No se encontraron diferencias significativas entre la longitud del estatoquinesiograma y la velocidad COP, excepto para la combinación-30%. Los valores medios, las desviaciones estándar y los límites superior e inferior del intervalo de confianza del 95% se pueden encontrar en la Tabla 3, todos los valores de p de las comparaciones de grupos se resumen en la Tabla 4.
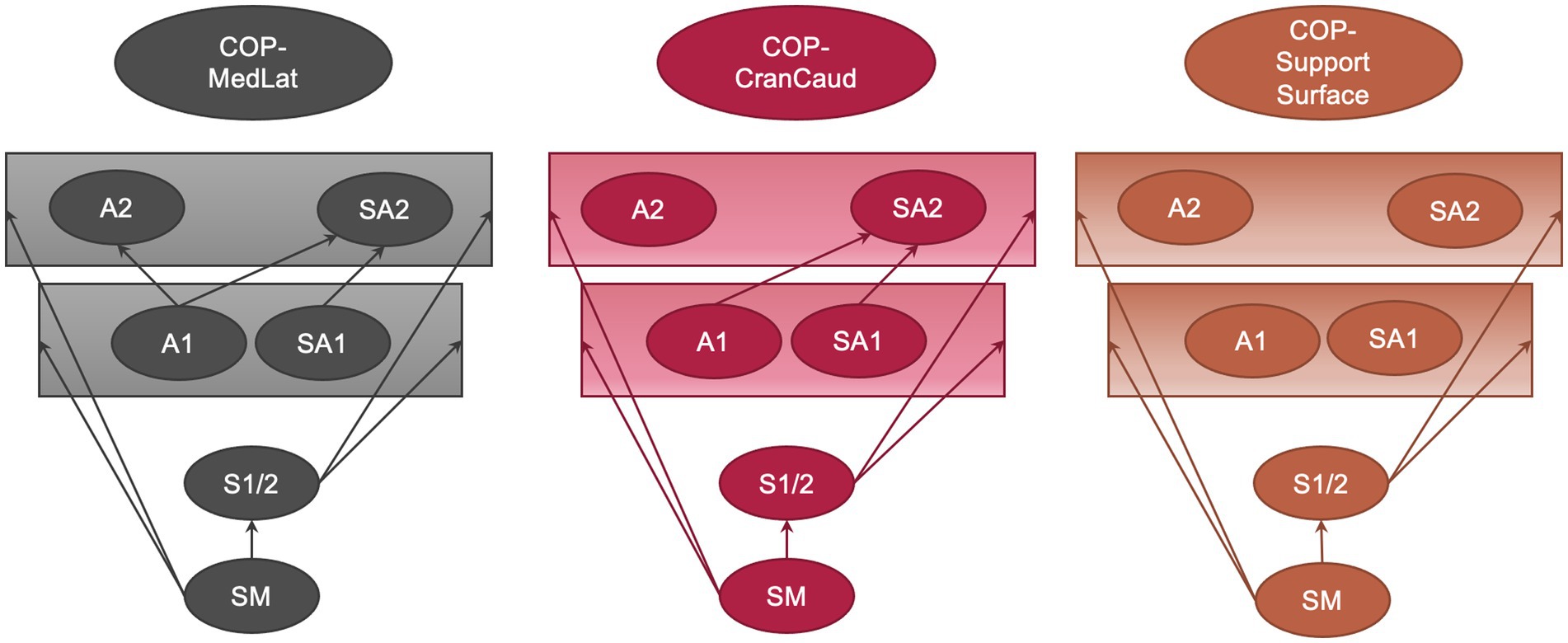 Figura 3. Comparación grupal del desplazamiento COP mediolateral (COP-MedLat) y craneocaudal (COP-CranCaud) y la superficie de apoyo entre todas las condiciones medidas, incluida la medición estándar de pie, los ajustes de velocidad (Velocidad-20%: velocidad 20%, amplitud 10%; Velocidad-30%: velocidad 30%, amplitud 10%); ajustes de amplitud (Amplitud-20%: velocidad 10%, amplitud 20%; Amplitud-30%: velocidad 10%, amplitud 30%); y ajuste combinado (Combinación-20%: velocidad 20%, amplitud 20%; Combinación-30%: velocidad 30%, amplitud 30%). Las flechas indican diferencias significativas entre las condiciones (p < 0,05).
Figura 3. Comparación grupal del desplazamiento COP mediolateral (COP-MedLat) y craneocaudal (COP-CranCaud) y la superficie de apoyo entre todas las condiciones medidas, incluida la medición estándar de pie, los ajustes de velocidad (Velocidad-20%: velocidad 20%, amplitud 10%; Velocidad-30%: velocidad 30%, amplitud 10%); ajustes de amplitud (Amplitud-20%: velocidad 10%, amplitud 20%; Amplitud-30%: velocidad 10%, amplitud 30%); y ajuste combinado (Combinación-20%: velocidad 20%, amplitud 20%; Combinación-30%: velocidad 30%, amplitud 30%). Las flechas indican diferencias significativas entre las condiciones (p < 0,05).
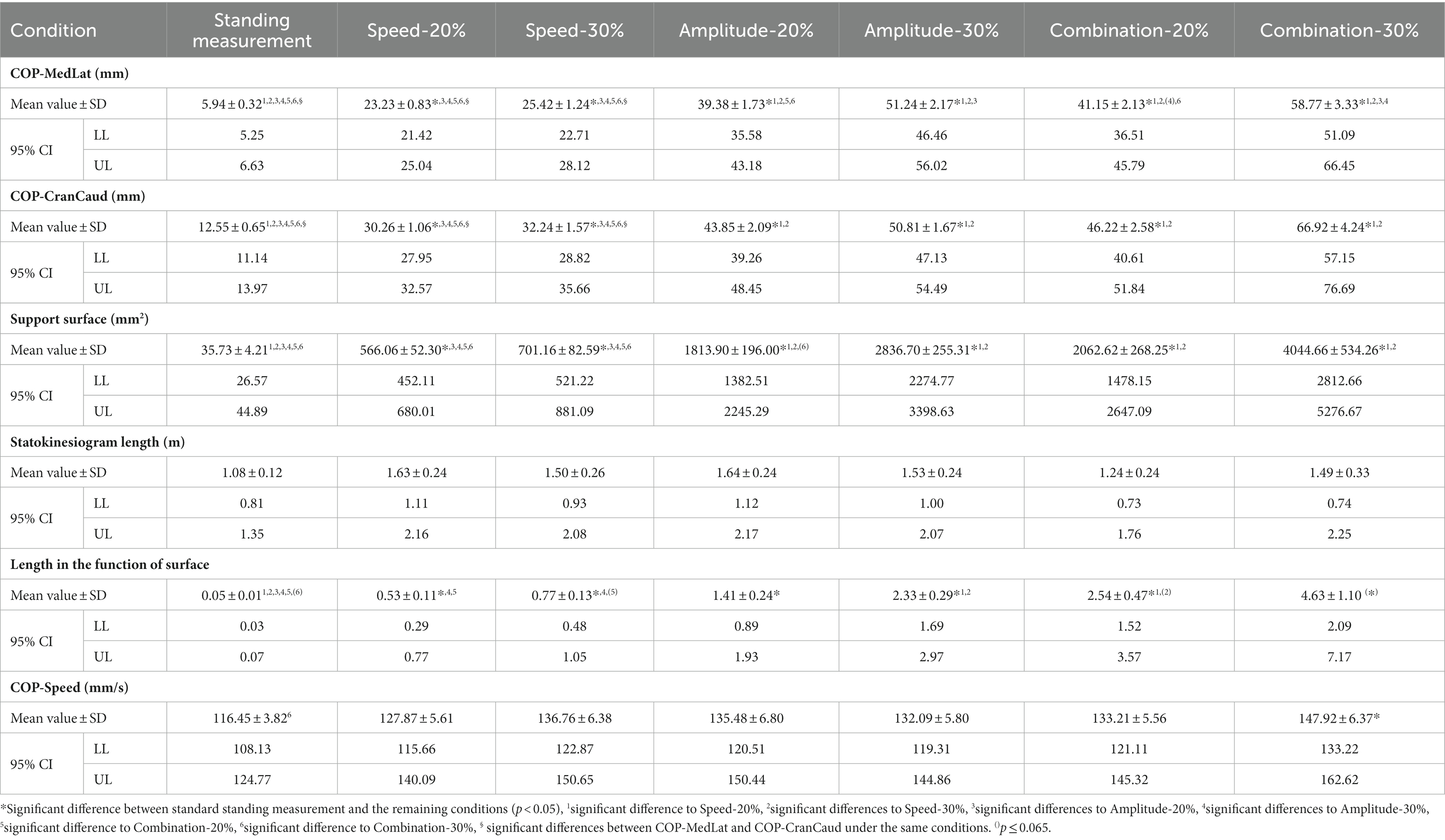 Tabla 3. Valores medios, desviación estándar (DE), límites inferior (LL) y superior (UL) del intervalo de confianza (IC) del 95% de la medición de condiciones de pie, ajustes de velocidad (Velocidad-20%, Velocidad-30%), ajustes de amplitud (Amplitud-20%, Amplitud-30%) y ajustes combinados (Combinación-20%, Combinación-30%) para el desplazamiento mediolateral COP (COP-MedLat), COP-desplazamiento craneocaudal (COP-CranCaud), superficie de apoyo, longitud del estatoquinesiograma, longitud en función de la superficie y velocidad COP.
Tabla 3. Valores medios, desviación estándar (DE), límites inferior (LL) y superior (UL) del intervalo de confianza (IC) del 95% de la medición de condiciones de pie, ajustes de velocidad (Velocidad-20%, Velocidad-30%), ajustes de amplitud (Amplitud-20%, Amplitud-30%) y ajustes combinados (Combinación-20%, Combinación-30%) para el desplazamiento mediolateral COP (COP-MedLat), COP-desplazamiento craneocaudal (COP-CranCaud), superficie de apoyo, longitud del estatoquinesiograma, longitud en función de la superficie y velocidad COP.
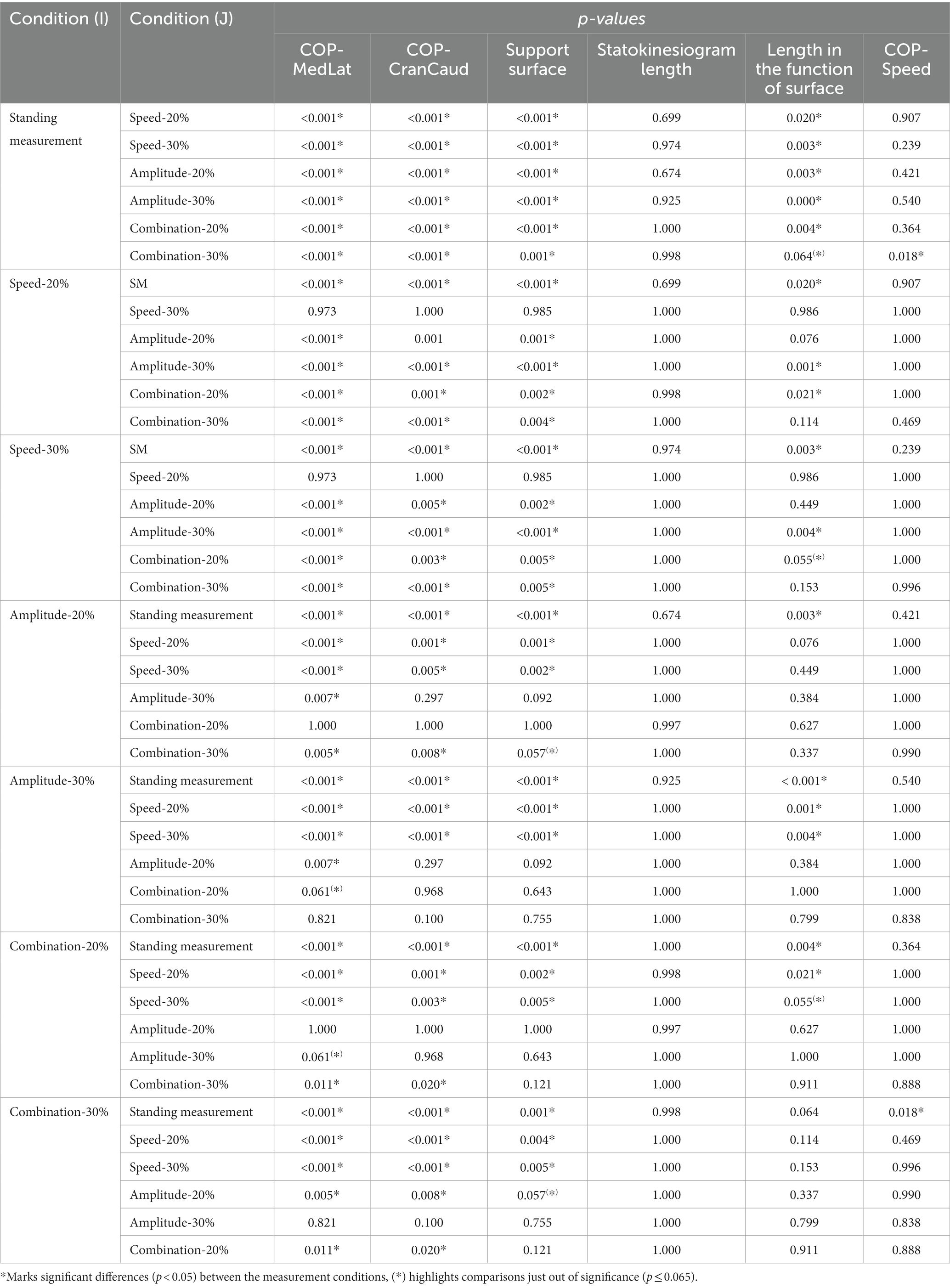 Tabla 4. Valores p de las comparaciones grupales de las condiciones de medición de pie, ajustes de velocidad (Velocidad-20%, Velocidad-30%), ajustes de amplitud (Amplitud-20%, Amplitud-30%) y ajustes combinados (Combinación-20%, Combinación-30%) para COP-desplazamiento mediolateral (COP-MedLat), COP-desplazamiento craneocaudal (COP-CranCaud), superficie de apoyo, Longitud del estatokinesiograma, Longitud en función de la superficie y velocidad COP.
Tabla 4. Valores p de las comparaciones grupales de las condiciones de medición de pie, ajustes de velocidad (Velocidad-20%, Velocidad-30%), ajustes de amplitud (Amplitud-20%, Amplitud-30%) y ajustes combinados (Combinación-20%, Combinación-30%) para COP-desplazamiento mediolateral (COP-MedLat), COP-desplazamiento craneocaudal (COP-CranCaud), superficie de apoyo, Longitud del estatokinesiograma, Longitud en función de la superficie y velocidad COP.
No se encontraron diferencias significativas en los parámetros COP durante condiciones con la misma amplitud (Velocidad-20% vs. Velocidad-30%, Amplitud-20% vs. Combinación-20% y Amplitud-30% vs. Combinación-30%). En comparación con Velocidad-20% y Velocidad-30%, todas las condiciones restantes resultaron en un aumento significativo de COP-MedLat, COP-CranCaud y superficie de soporte. Se observó un aumento adicional en COP-MedLat durante la amplitud-30% en comparación con la amplitud-20% y la combinación-20%, mientras que no se encontraron diferencias significativas en los parámetros restantes. La combinación de la mayor amplitud y la velocidad más rápida (Combinación-30%) resultó en un aumento significativo en el COP-MedLat y COP-CranCaud (superficie de soporte en comparación con la amplitud-20%, solo fuera de importancia) en comparación con todas las demás condiciones.
La longitud en la función de la superficie aumentó significativamente durante la combinación-20% y la amplitud-30% en comparación con la velocidad-20%, y la amplitud-30% en comparación con la velocidad-30% (combinación-20% justo fuera de importancia). No se encontraron diferencias significativas entre la longitud del estatoquinesiograma y las condiciones de velocidad.
El desplazamiento de COP fue significativamente mayor en COP-MedLat que en COP-CranCaud durante la medición de pie, Velocidad-20% y Velocidad-30%, mientras que no se observaron diferencias significativas durante las condiciones restantes (Tabla 5).
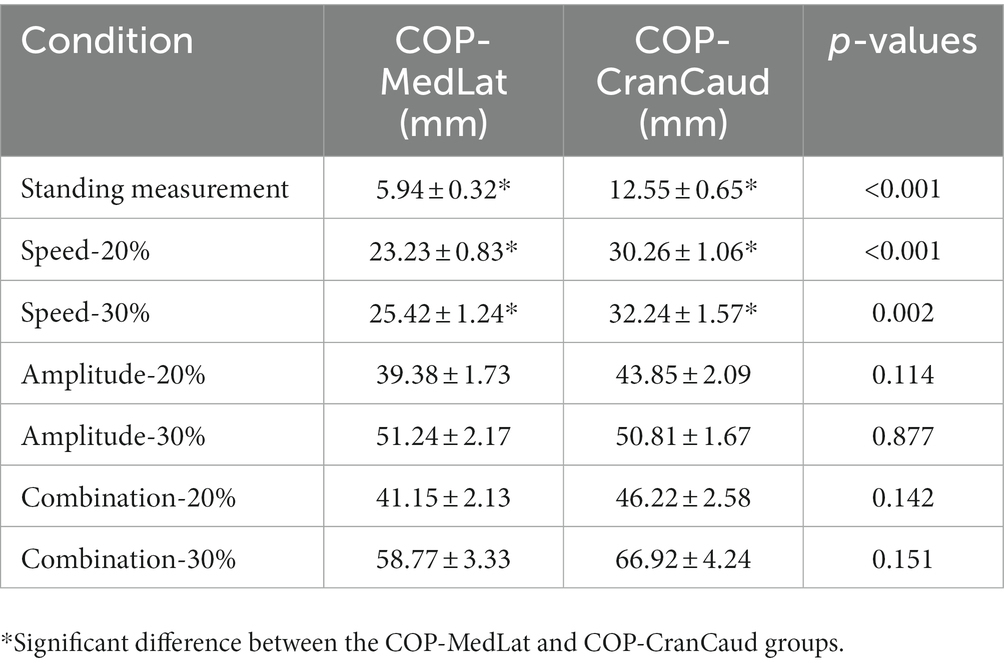 Tabla 5. Valores medios, desviación estándar y valores p de COP-MedLat y COP-CranCaud durante la misma condición de medición.
Tabla 5. Valores medios, desviación estándar y valores p de COP-MedLat y COP-CranCaud durante la misma condición de medición.
4. Discusión
En el presente estudio, se utilizaron movimientos circulares tridimensionales para investigar los efectos de las perturbaciones externas en el equilibrio de pie de los perros sanos. Planteamos la hipótesis de que las perturbaciones externas desafían la PS en perros, lo que se refleja en los parámetros COP del cuerpo. Además, planteamos la hipótesis de que los ajustes de amplitud y velocidad más altos dan como resultado signos de mayor inestabilidad y que un aumento en la amplitud tiene un efecto más fuerte que un aumento en la velocidad. Por lo tanto, estas hipótesis fueron parcialmente confirmadas.
Con respecto a la primera hipótesis, fue posible demostrar que en comparación con la medición de pie, cada ajuste estudiado resultó en un aumento significativo en casi todos los parámetros de COP, lo que indica un desafío para la PS. Además, el ajuste de amplitud tiene un efecto mayor que el ajuste de velocidad. Un aumento en la velocidad no resultó en una mayor inestabilidad, porque no se encontró diferencia significativa en los parámetros COP entre los ajustes de velocidad. Esto es parcialmente consistente con lo que se ha encontrado en humanos: similar a nuestros resultados, la velocidad de la perturbación en una plataforma motorizada no tuvo un efecto significativo sobre COP-MedLat y COP-CranCaud en individuos sanos. Sin embargo, la longitud del estatoquinesiograma aumentó significativamente durante el ajuste de mayor velocidad (48). Por lo tanto, los estudios futuros deberían usar velocidades más altas que las utilizadas en este estudio para investigar con mayor precisión este efecto en perros. Si bien no se han realizado estudios comparables utilizando una plataforma motorizada en medicina veterinaria, se obtuvo un patrón similar de resultados en caballos con los ojos vendados, lo que llevó a un aumento significativo en COP-MedLat y COP-CranCaud en comparación con las mediciones durante la visión no perturbada (23).
Sobre la base del aumento significativo de los parámetros COP durante los ajustes con una amplitud aumentada, se puede concluir que, para futuras investigaciones con dispositivos similares, se deben preferir los ajustes con grandes amplitudes sobre aquellos con altas velocidades. Si bien la combinación de gran amplitud y alta velocidad resultó en el mayor desplazamiento en ambos ejes, el entorno utilizado en este estudio (Combinación-30%) no fue bien tolerado por los perros.
Además, los resultados de medición para la condición Combinación-30% mostraron una amplia variación en la longitud en la función de la superficie. Se puede suponer que la amplitud del intervalo de confianza resultó en una falta de significación. La variación en la longitud en la función de los valores de superficie entre perros indicó que la condición de medición Combinación-30% era demasiado difícil para obtener datos confiables para la evaluación de los parámetros COP. Esta suposición se ve corroborada por el hecho de que solo nueve de los 13 perros pudieron quedarse quietos durante la duración de medición requerida. Con base en las descripciones de la base de apoyo en humanos (34), se puede sugerir que el COP excedió la base funcional de soporte en mediciones en las que los perros no permanecieron quietos durante el tiempo requerido, lo que resultó en medidas de protección para evitar caídas. Por lo tanto, las mediciones que utilizan ajustes similares a Combinación-30% no se recomiendan para futuros proyectos de investigación.
Durante las condiciones de medición y velocidad de pie (Velocidad-20% y Velocidad-30%), el desplazamiento de COP fue significativamente mayor en COP-CranCaud que en COP-MedLat. Mientras que el COP en humanos muestra un patrón similar con una mayor migración en la dirección craneocaudal, los resultados son contrarios a los hallazgos en ponis, que muestran un COP-MedLat más grande que COP-CranCaud durante la medición de pie de las extremidades anteriores (15). Del mismo modo, la superficie de apoyo mostró una migración más pronunciada en la dirección mediolateral en perros durante la medición de pie de las extremidades anteriores (11, 14) y posteriores (11). Si bien los investigadores han encontrado que las extremidades anteriores y posteriores se pueden usar para determinar la COP corporal en caballos sanos, los coeficientes de correlación entre los datos de COP de cuerpo total y las extremidades anteriores fueron más altos que los de los datos de las extremidades posteriores. Por lo tanto, los autores sugirieron preferir las mediciones de las extremidades anteriores para evaluar la COP corporal en caballos (31). En los perros, no hay datos disponibles con respecto a la exactitud de estos procedimientos de medición y los resultados contradictorios deben considerarse con precaución debido a las diferentes técnicas de medición. Numerosas diferencias anatómicas entre caballos y perros pueden explicar los diferentes mecanismos compensatorios que mantienen la estabilidad durante la medición de pie. La digitalización en perros puede ofrecer más estabilidad en la dirección mediolateral que en las especies unguligradas (67). Sin embargo, se pueden observar mecanismos de compensación específicos de la raza durante el equilibrio de pie en los perros debido a las diferencias en la distribución de la presión en las patas (68-70). Además, el rango más versátil de las articulaciones del hombro y la cadera en perros (67) puede contribuir a una mayor estabilidad en la dirección mediolateral. Esto también está respaldado por el hecho de que el control mediolateral de la estabilidad postural en humanos se basa principalmente en un mecanismo de cadera (71). Las capacidades de abducción y aducción menos pronunciadas de las articulaciones del hombro y la cadera en caballos (67) podrían dar lugar a mecanismos compensatorios limitados en el eje mediolateral durante la posición tranquila.
Las condiciones más desafiantes (Amplitud-20%, Amplitud-30%, Combinación-20% y Combinación-30%) dieron lugar a la falta de diferencias significativas entre COP-MedLat y COP-CranCaud. Esto puede explicarse por la forma rectangular de la base de apoyo en perros. Como la longitud mediolateral de la base de apoyo es más pequeña, los animales parecen ser menos estables en esta dirección, como se propone para los ponis. Del mismo modo, los ponis cojos mostraron un desplazamiento significativamente mayor en el eje X que en el grupo de control, mientras que no se observaron diferencias en COP-CranCaud (15). Por lo tanto, mantener una posición vertical en el eje mediolateral es más difícil que en el eje craneocaudal en caballos y perros. Se ha propuesto que se necesitan fuerzas más grandes para contrarrestar la perturbación mediolateral del PS, debido a la forma rectangular de la base de apoyo observada en caballos (23). Esta interpretación está de acuerdo con las observaciones hechas durante la postura en tándem en humanos. Similar a nuestros resultados, una base estrecha de apoyo en el eje mediolateral en comparación con la posición normal de pie resultó en una mayor inestabilidad (53-55). Sin embargo, se ha descrito previamente en medicina humana una fuerte correlación entre el aumento de la longitud del estatocinesiograma durante las perturbaciones mecánicas externas sinusoidales y COP-MedLat durante una posición normal de pie; sin embargo, los autores no incluyeron una comparación entre COP-MedLat y COP-CranCaud (48). Además, la estabilidad postural se ve desafiada más durante las perturbaciones laterales que craneocaudales en individuos sanos y pacientes con enfermedad de Parkinson (49), lo que contrasta con la teoría de que el aumento de la longitud del eje mediolateral de la base de apoyo en humanos proporciona una mejor estabilidad (72, 73). Por lo tanto, se puede sugerir que la estabilidad postural no puede explicarse únicamente en función de la forma de la base de apoyo, especialmente durante las perturbaciones externas. En caballos, se ha propuesto que los músculos extensor y flexor están mejor desarrollados que los músculos abductor y aductor y contribuyen a la inestabilidad en la dirección mediolateral (74), que también podría aplicarse a los perros cuando se desafía la PS.
Además, la investigación médica en humanos ha encontrado un aumento significativo en el desplazamiento de COP cuando una perturbación externa es impredecible en comparación con los procedimientos de medición, donde es posible un ajuste postural anticipatorio debido a una perturbación predecible. Estos resultados llevan a la conclusión de que los planes de entrenamiento de control postural son valiosos para mejorar la interacción entre PS anticipatoria y compensatoria (75). Del mismo modo, las mediciones repetitivas que utilizan la traducción predictiva hacia adelante y hacia atrás en una plataforma motorizada condujeron a una disminución significativa en el desplazamiento de COP. En conclusión, el cuerpo humano se adapta a las perturbaciones predictivas y repetitivas modificando la actividad muscular (46). Dados los movimientos sinusoidales de los ajustes seleccionados, la perturbación externa utilizada en este estudio puede clasificarse como predecible. Por lo tanto, los estudios futuros que utilicen entornos predecibles e impredecibles pueden proporcionar más información sobre si los perros responden de manera similar a los humanos cuando se aplican perturbaciones externas impredecibles al cuerpo de un animal. Estas mediciones deben complementarse con el análisis de la actividad electromiográfica para investigar la activación muscular previa cuando una perturbación es predecible, como se describe en medicina humana (46, 75). La activación muscular y los desplazamientos de COP difirieron entre individuos ancianos y jóvenes (75) y, como se mencionó anteriormente, los perros seniles (>75% de la esperanza de vida esperada) (16) y los perros ortopédicamente enfermos (11, 14) mostraron alteraciones en los parámetros de COP en comparación con los perros jóvenes y sanos durante la medición de pie. Por lo tanto, las alteraciones en las estrategias de activación muscular en perros seniles y ortopédicamente enfermos deben ser el foco de futuras investigaciones.
Los ejercicios de equilibrio con tablas de bamboleo y cojines son una parte integral de la rehabilitación de enfermedades neurológicas y ortopédicas para mejorar la función muscular y la PS (76, 77). Además, se recomienda un programa de entrenamiento que incluya desafíos de PS en perros deportivos para prevenir el riesgo de lesiones (77, 78) y en animales ancianos para mantener una buena calidad de vida (60). Sin embargo, la suposición de que los programas de entrenamiento propioceptivo afectan positivamente la PS se basa en estudios médicos en humanos (79). La investigación en humanos ha encontrado que la efectividad de la recuperación del equilibrio se puede entrenar o volver a aprender, y los ejercicios basados en perturbaciones han demostrado impactos positivos en el rendimiento del equilibrio reactivo en el accidente cerebrovascular (80, 81), la enfermedad de Parkinson (42) y los pacientes con ruptura del ligamento cruzado anterior (7, 8). Por lo tanto, los estudios futuros de medicina veterinaria deben centrarse en los efectos de los programas de entrenamiento de PS en animales enfermos.
Los entornos investigados se pueden utilizar como orientación para la implementación de perturbaciones externas en la rehabilitación y la investigación de enfermedades que se considera que afectan negativamente a la PS. Se puede sugerir el siguiente esquema gradual: debido a que la velocidad es menos desafiante para PS que la amplitud, los perros débiles deben comenzar con una amplitud pequeña (Velocidad-20%, Velocidad-30%). Esta dificultad se puede aumentar aumentando la amplitud (Amplitud-20%, Combinación-20%); sin embargo, debe considerarse que la Combinación-20% no tiene efectos superiores a la Amplitud-20%. La combinación de alta velocidad y gran amplitud (Combinación-30%) aumenta aún más el desafío en las direcciones mediolateral y craneocaudal. Sin embargo, los perros sanos no funcionan bien en estas condiciones. Por lo tanto, primero se debe realizar un aumento adicional utilizando una amplitud mayor con una velocidad lenta (amplitud-30%), lo que es ventajoso en la dirección mediolateral.
Una limitación de nuestro estudio fue el pequeño tamaño de la muestra de 13 perros. A pesar de que los criterios de inclusión fueron diseñados para limitar este estudio a perros adultos sanos con tipo de cuerpo y peso similares, debe mencionarse que investigaciones anteriores encontraron una correlación significativa entre el peso, la altura y la longitud y los resultados de las mediciones de COP (16).
5. Conclusión
Hasta donde sabemos, este es el primer estudio que demuestra que las perturbaciones mecánicas externas desafían la PS en perros. Todas las condiciones condujeron a un aumento significativo en COP-MedLat, COP-CranCaud y superficie de soporte en comparación con la medición de pie. Además, el grado de desplazamiento se correlacionó positivamente con el aumento de la amplitud. Todos los entornos probados, excepto Combination-30%, que no fue bien tolerado por los perros, se recomiendan para futuros programas de investigación y entrenamiento. Si bien el desplazamiento de COP fue significativamente mayor en la dirección craneocaudal que en la dirección mediolateral durante la medición de pie y los ajustes con una amplitud baja, no se encontraron diferencias significativas durante las condiciones más desafiantes. Por lo tanto, se puede sugerir que los perros son menos estables durante una alteración mediolateral de PS. Los estudios adicionales deben abordar los efectos de las perturbaciones externas en los parámetros de COP en perros jóvenes, seniles y ortopédica o neurológicamente enfermos. Estas mediciones deben complementarse con la determinación de la actividad muscular mediante análisis electromiográfico.
Declaración de disponibilidad de datos
Los datos brutos que apoyan las conclusiones de este artículo serán puestos a disposición por los autores, sin reservas indebidas.
Declaración ética
Los estudios en animales fueron aprobados por el Comité de Ética y Bienestar Animal de la Universidad de Medicina Veterinaria de Viena. Los estudios se realizaron de acuerdo con la legislación local y los requisitos institucionales. Se obtuvo el consentimiento informado por escrito de los propietarios para la participación de sus animales en este estudio.
Contribuciones del autor
BB, CP y CL: conceptualización, metodología y validación. AT: análisis formal. CL y RG: curación de datos. CL: redacción: preparación del borrador original. BB, MM, CP, BR y CL: escritura: revisión y edición. Todos los autores contribuyeron al artículo y aprobaron la versión presentada.
Financiación
Allcare Innovations (111 Rue Carl von Linné, 26500 Bourg les Valence, Francia) redujo el costo de compra del Imoove® Vet en un 40% para garantizar que el estudio fuera financieramente viable.
Reconocimientos
Los autores desean agradecer a todos los perros participantes, a sus dueños y a Allcare Innovations por sus contribuciones.
Conflicto de intereses
Los autores declaran que la investigación se llevó a cabo en ausencia de cualquier relación comercial o financiera que pudiera interpretarse como un posible conflicto de intereses.
Nota del editor
Todas las afirmaciones expresadas en este artículo son únicamente las de los autores y no representan necesariamente las de sus organizaciones afiliadas, o las del editor, los editores y los revisores. Cualquier producto que pueda ser evaluado en este artículo, o reclamo que pueda ser hecho por su fabricante, no está garantizado ni respaldado por el editor.
Referencias
1. Pollock, AS, Durward, BR, Rowe, PJ, y Paul, JP. ¿Qué es el equilibrio? Clin Rehabil. (2000) 14:402–6. doi: 10.1191/0269215500cr342oa
2. Faraldo-García, A, Santos-Pérez, S, Crujeiras-Casais, R, Labella-Caballero, T, and Soto-Varela, A. Influence of age and gender in the sensory analysis of balance control. Eur Arch Otorrinolaringol. (2012) 269:673–7. DOI: 10.1007/S00405-011-1707-7
Resumen de PubMed | Texto completo de CrossRef | Google Académico
3. Bezalel, G, Nachoum Arad, G, Plotnik, M, y Friedman, J. Ejecución voluntaria de pasos en pacientes con osteoartritis de rodilla: piernas sintomáticas vs. no sintomáticas. Postura de la marcha. (2021) 83:60–6. doi: 10.1016/j.gaitpost.2020.10.006
Resumen de PubMed | Texto completo de CrossRef | Google Académico
4. Rambaud, AJ, Semay, B, Samozino, P, Morin, J-B, Testa, R, Philippot, R, et al. Criterios para la reincorporación al deporte tras la reconstrucción del ligamento cruzado anterior con menor riesgo de relesión (estudio CR’STRAT): protocolo para un estudio observacional prospectivo en Francia. BMJ Abierto. (2017) 7:E015087. DOI: 10.1136/BMJOPEN-2016-015087
Resumen de PubMed | Texto completo de CrossRef | Google Académico
5. Schweizer, N, Strutzenberger, G, Franchi, MV, Farshad, M, Scherr, J, and Spörri, J. Screening tests for assessing arthletes at risk of ACL injury or rseinjury-a scoping review. Int J Medio Ambiente Salud Pública. (2022) 19:19. doi: 10.3390/ijerph19052864
Resumen de PubMed | Texto completo de CrossRef | Google Académico
6. Novaes, M, Carvalho, A, Sauer, JF, Brech, GC, Helito, CP y João, SM. Control postural durante la postura de una sola pierna en individuos con indicación clínica para la reconstrucción combinada del cruzado anterior y los ligamentos anterolaterales de la rodilla: un estudio transversal. BMC Musculoskelet Disord. (2022) 23:383. DOI: 10.1186/S12891-022-05347-0
Resumen de PubMed | Texto completo de CrossRef | Google Académico
7. Molka, AZ, Lisiński, P, and Huber, J. Visual biofeedback exercises for improve body balance control after anterior crossciate reconstruction. J Phys Ther Sci. (2015) 27:2357–60. DOI: 10.1589/JPTS.27.2357
Resumen de PubMed | Texto completo de CrossRef | Google Académico
8. Zemkova, E, y Vlašič, M. El efecto del entrenamiento de resistencia a la inestabilidad en el rendimiento neuromuscular en atletas después de una lesión del ligamento cruzado anterior. Deporte Sci. (2009) 2:17–23.
9. Palmieri, RM, Ingersoll, CD, Stone, MB y Krause, BA. Parámetros del centro de presión utilizados en la evaluación del control postural. J Sport Rehabil. (2002) 11:51–66. doi: 10.1123/JSR.11.1.51
10. Reicher, B, Tichy, A, y Bockstahler, B. Centro de presión en las patas de perros clínicamente sanos en comparación con perros ortopédicamente enfermos. Animales. (2020) 10:1366. DOI: 10.3390/ANI10081366
Resumen de PubMed | Texto completo de CrossRef | Google Académico
11. Carrillo, JM, Manera, ME, Rubio, M, Sopena, J, Santana, A, y Vilar, JM. Posturografía y pedobarografía dinámica en perros cojos con displasia de codo y rotura del ligamento cruzado craneal. BMC Vet Res. (2018) 14:108. DOI: 10.1186/S12917-018-1435-Y
Resumen de PubMed | Texto completo de CrossRef | Google Académico
12. López, S, Vilar, JM, Rubio, M, Sopena, JJ, Damiá, E, Chicharro, D, et al. Centro de diferencias de la trayectoria de las extremidades de presión para la detección de cojera en perros: un estudio preliminar. BMC Vet Res. (2019) 15:138. DOI: 10.1186/S12917-019-1881-1
Resumen de PubMed | Texto completo de CrossRef | Google Académico
13. López, S, Vilar, JM, Rubio, M, Sopena, JJ, Santana, A, Rodríguez, O, et al. Pedobarografía: un enfoque novedoso para probar la eficacia de los tratamientos para la cojera; Una experiencia con mavacoxib en perros con artrosis de codo. BMC Vet Res. (2019) 15:193. DOI: 10.1186/S12917-019-1946-1
Resumen de PubMed | Texto completo de CrossRef | Google Académico
14. Manera, ME, Carrillo, JM, Batista, M, Rubio, M, Sopena, J, Santana, A, et al. Posturografía estática: una nueva perspectiva en la evaluación de la cojera en un modelo canino. PLoS One. (2017) 12:E0170692. doi: 10.1371/journal.pone.0170692
Resumen de PubMed | Texto completo de CrossRef | Google Académico
15. Pitti, L, Oosterlinck, M, Díaz-Bertrana, ML, Carrillo, JM, Rubio, M, Sopena, J, et al. Evaluación de la posturografía estática y la pedobarografía para la detección de cojera unilateral de las extremidades anteriores en ponis. BMC Vet Res. (2018) 14:151. DOI: 10.1186/S12917-018-1462-8
Resumen de PubMed | Texto completo de CrossRef | Google Académico
16. Mondino, A, Wagner, G, Russell, K, Lobaton, E, Griffith, E, Gruen, M, et al. La posturografía estática como medida novedosa de los efectos del envejecimiento sobre el control postural en perros. PLoS One. (2022) 17:E0268390. doi: 10.1371/journal.pone.0268390
Resumen de PubMed | Texto completo de CrossRef | Google Académico
17. Charalambous, D, Strasser, T, Tichy, A, and Bockstahler, B. Ground reaction forces and Center of Pressure within the paws when pising over obstacles in dogs. Animales. (2022) 12:1702. doi: 10.3390/ani12131702
Resumen de PubMed | Texto completo de CrossRef | Google Académico
18. Charalambous, D, Lutonsky, C, Keider, S, Tichy, A, and Bockstahler, B. Vertical ground reaction forces, paw pressure distribution, and center of pressure during heelwork in working dogs competing in obedience. Front Vet Sci. (2023) 10:1106170. doi: 10.3389/fvets.2023.1106170
Resumen de PubMed | Texto completo de CrossRef | Google Académico
19. Bieber, B, Reicher, B, Tichy, A, and Bockstahler, B. Changes in ground reaction forces and center of pressure parameters of paws when wearing dog boots in dogs. Front Vet Sci. (2022) 9:906277. DOI: 10.3389/FVETS.2022.906277
Resumen de PubMed | Texto completo de CrossRef | Google Académico
20. Virag, Y, Gumpenberger, M, Tichy, A, Lutonsky, C, Peham, C, and Bockstahler, B. Center of pressure and ground reaction forces in Labrador and Golden retrievers with and without hip dysplasia at 4, 8, and 12 months of age. Front Vet Sci. (2022) 9:1087693. DOI: 10.3389/fvets.2022.1087693
Resumen de PubMed | Texto completo de CrossRef | Google Académico
21. Blau, SR, Davis, LM, Gorney, AM, Dohse, CS, Williams, KD, Lim, J-H, et al. Cuantificación del centro de variabilidad de la presión en perros condrodistrofoides. Veterinario J. (2017) 226:26–31. doi: 10.1016/j.tvjl.2017.07.001
Resumen de PubMed | Texto completo de CrossRef | Google Académico
22. Nauwelaerts, S, Malone, SR, y Clayton, HM. Desarrollo del equilibrio postural en potros. Veterinario J. (2013) 198:E70–4. doi: 10.1016/j.tvjl.2013.09.036
Resumen de PubMed | Texto completo de CrossRef | Google Académico
23. Clayton, HM, and Nauwelaerts, S. Effect of blindfolding on Centre of pressure variables in healthy horses during quiet standing. Veterinario J. (2014) 199:365–9. doi: 10.1016/j.tvjl.2013.12.018
Resumen de PubMed | Texto completo de CrossRef | Google Académico
24. Vero, AM, Wagner, G, Lobaton, E, Russell, K, and Olby, N. Age-related changes in posture steadiness in the companion dog. Innov Envejecimiento. (2021) 5:959–60. doi: 10.1093/geroni/igab046.3461
25. Lewis, MJ, Williams, KD, Langley, T, Jarvis, LM, Sawicki, GS y Olby, NJ. Desarrollo de una novedosa herramienta de análisis de la marcha que mide el centro de presión para la evaluación de la lesión medular toracolumbar crónica canina. J Neurotrauma. (2019) 36:3018–25. doi: 10.1089/neu.2019.6479
Resumen de PubMed | Texto completo de CrossRef | Google Académico
26. Lee, S, Lee, J-M, Park, H, Cha, Y, and Cheong, J. Balance evaluation after reconstruction of medial patellar luxation in small-sized dogs with Wii balance board. J Vet Clin. (2019) 36:301–5. doi: 10.17555/jvc.2019.12.36.6.301
27. Lee, S, Lee, J-M, Park, H, Cha, Y, and Cheong, J. Validity of the Wii balance board for evaluation of medial patellar lsuxation in small size dog. J Vet Clin. (2019) 36:297–300. doi: 10.17555/jvc.2019.12.36.6.297
28. Clayton, HM, Bialski, DE, Lanovaz, JL, and Mullineaux, DR. Assessment of the reliability of a technique to measure postural sway in horses. Am J Vet Res. (2003) 64:1354–9. DOI: 10.2460/AJVR.2003.64.1354
Resumen de PubMed | Texto completo de CrossRef | Google Académico
29. Dewolf, AH, Ivanenko, YP, Mesquita, RM y Willems, PA. Control postural en el elefante. J Exp Biol. (2021) 224:648. DOI: 10.1242/JEB.243648
Resumen de PubMed | Texto completo de CrossRef | Google Académico
30. Chang, Y-H, y Ting, LH. Evidencia mecánica de que los flamencos pueden sostener su cuerpo en una pierna con poca fuerza muscular activa. Biol Lett. (2017) 13:20160948. DOI: 10.1098/RSBL.2016.0948
Resumen de PubMed | Texto completo de CrossRef | Google Académico
31. Clayton, HM, y Nauwelaerts, S. ¿Es adecuada una sola placa de fuerza para el análisis estabilográfico en caballos? Veterinario equino J. (2012) 44:550–3. doi: 10.1111/j.2042-3306.2011.00458.x
Resumen de PubMed | Texto completo de CrossRef | Google Académico
32. Pai, YC, Rogers, MW, Patton, J, Cain, TD, y Hanke, TA. Predicciones estáticas versus dinámicas de pasos protectores después de perturbaciones de tracción de cintura en adultos jóvenes y mayores. J Biomech. (1998) 31:1111–8. DOI: 10.1016/S0021-9290(98)00124-9
Resumen de PubMed | Texto completo de CrossRef | Google Académico
33. Hof, AL, Gazendam, MG, y Sinke, WE. La condición para la estabilidad dinámica. J Biomech. (2005) 38:1–8. doi: 10.1016/j.jbiomech.2004.03.025
34. Horak, FB, Shupert, CL, y Mirka, A. Componentes del descontrol postural en los ancianos: una revisión. Neurobiol Envejecimiento. (1989) 10:727–38. doi: 10.1016/0197-4580(89)90010-9
Resumen de PubMed | Texto completo de CrossRef | Google Académico
35. Fujimoto, M, Bair, W-N, y Rogers, MW. Centro de control de presión para el mantenimiento del equilibrio durante perturbaciones laterales de tracción de cintura en adultos mayores. J Biomech. (2015) 48:963–8. doi: 10.1016/j.jbiomech.2015.02.012
Resumen de PubMed | Texto completo de CrossRef | Google Académico
36. Baratto, L, Morasso, PG, Re, C, y Spada, G. Una nueva mirada al análisis posturográfico en el contexto clínico: densidad de balanceo versus otras técnicas de parametrización. Control de motas. (2002) 6:246–70. doi: 10.1123/mcj.6.3.246
Resumen de PubMed | Texto completo de CrossRef | Google Académico
37. Fabbri, M, Martoni, M, Esposito, MJ, Brighetti, G, and Natale, V. Postural control after a night without sleep. Neuropsicologia. (2006) 44:2520–5. doi: 10.1016/j.neuropsychologia.2006.03.033
38. van Humbeeck, N, Kliegl, R, y Krampe, RT. Lifespan changes in postural control. Sci Rep. (2023) 13:541. DOI: 10.1038/S41598-022-26934-0
Resumen de PubMed | Texto completo de CrossRef | Google Académico
39. Efstathiou, MA, Giannaki, CD, Roupa, Z, Hadjisavvas, S, and Stefanakis, M. Evidence of distorted propioception and postural control in studies of experimentalally induced pain: a critical review of the literature. Scand J Dolor. (2022) 22:445–56. DOI: 10.1515/SJPAIN-2021-0205
Resumen de PubMed | Texto completo de CrossRef | Google Académico
40. Petró, B, Papachatzopoulou, A, y Kiss, RM. Dispositivos y tareas involucradas en la evaluación objetiva del equilibrio dinámico permanente: una revisión sistemática de la literatura. PLoS One. (2017) 12:E0185188. doi: 10.1371/journal.pone.0185188
Resumen de PubMed | Texto completo de CrossRef | Google Académico
41. Kirsch, AN, Bodkin, SG, Saliba, SA, y Hart, JM. Medidas de agilidad y equilibrio de una sola pierna como evaluaciones clínicas en pacientes con reconstrucción del ligamento cruzado anterior e individuos sanos. Tren J Athl. (2019) 54:1260–8. DOI: 10.4085/1062-6050-266-18
Resumen de PubMed | Texto completo de CrossRef | Google Académico
42. Jöbges, M, Heuschkel, G, Pretzel, C, Illhardt, C, Renner, C, and Hummelsheim, H. Repetitive training of compensatory steps: a therapeutic approach for postural instability in Parkinson’s disease. J Neurol Neurosurg Psiquiatría. (2004) 75:1682–7. doi: 10.1136/jnnp.2003.016550
Resumen de PubMed | Texto completo de CrossRef | Google Académico
43. Mademli, L, Mavridi, D, Bohm, S, Patikas, DA, Santuz, A, y Arampatzis, A. Standing on unstable surface challenges postural control of tracking tasks and modulates neuromuscular adjustment specific to task complexity. Sci Rep. (2021) 11:6122. DOI: 10.1038/S41598-021-84899-Y
Resumen de PubMed | Texto completo de CrossRef | Google Académico
44. Brophy, RH, Schafer, KA, Knapik, DM, Motley, J, Haas, A, Matava, MJ, et al. Cambios en la estabilidad postural dinámica después de la reconstrucción del LCA: resultados durante 2 años de seguimiento. Orthop J Sports Med. (2022) 10:23259671221098989. doi: 10.1177/23259671221098989
Resumen de PubMed | Texto completo de CrossRef | Google Académico
45. Dae-Hee, L, Jin-Hyuck, L, Sung-Eun, A, and Min-Ji, P. Effect of time after anterior crossciate ligament breaks on propioception and postural stability. PLoS One. (2015) 10:E0139038. doi: 10.1371/journal.pone.0139038
46. Kennedy, A, Bugnariu, N, Guevel, A, and Sveistrup, H. Adaptation of the feedforward postural response to repeat continuous postural perturbations. Neurosci Med. (2013) 4:45–9. doi: 10.4236/nm.2013.41007
47. Lysholm, M, Ledin, T, Odkvist, LM, and Good, L. Postural control–a comparison between patients with chronic anterior crossciate ligament insufficiency and individuals healthy (Control postural: una comparación entre pacientes con insuficiencia crónica del ligamento cruzado anterior e individuos sanos). Scand J Med Sci Sports. (1998) 8:432–8. doi: 10.1111/j.1600-0838.1998.tb00464.x
48. Grassi, L, Rossi, S, and Cappa, P. Dynamic Posturography: perturbed equilibrium assessment on healthy adult subjects. En: IEEE international symposium on medical measurements and applications (MeMeA) proceedings, Turín, Italia (2015).
49. Vaugoyeau, M, Viel, S, Assaiante, C, Amblard, B, y Azulay, JP. Deterioro del control postural vertical y déficits de integración propioceptiva en la enfermedad de Parkinson. Neurociencia. (2007) 146:852–63. doi: 10.1016/j.neuroscience.2007.01.052
Resumen de PubMed | Texto completo de CrossRef | Google Académico
50. O’Connell, M, George, K, and Stock, D. Postural sway and balance testing: a comparison of normal and anterior ligament deficient knees. Postura de la marcha. (1998) 8:136–42. doi: 10.1016/S0966-6362(98)00023-X
Resumen de PubMed | Texto completo de CrossRef | Google Académico
51. Bodkin, SG, Slater, LV, Norte, GE, Goetschius, J y Hart, JM. Los individuos reconstruidos con LCA no demuestran déficits en el control postural medido por el equilibrio de una sola pierna. Postura de la marcha. (2018) 66:296–9. doi: 10.1016/j.gaitpost.2018.06.120
52. Lee, C-H, y Sun, T-L. Evaluación de la estabilidad postural basada en una placa de fuerza y un sensor inercial durante las mediciones de equilibrio estático. J Physiol Antropol. (2018) 37:27. DOI: 10.1186/S40101-018-0187-5
Resumen de PubMed | Texto completo de CrossRef | Google Académico
53. Berg, K. Measuring balance in the elderly: preliminary development of an instrument. Physiother puede. (1989) 41:304–11. DOI: 10.3138/PTC.41.6.304
54. Tesio, L, Perucca, L, Franchignoni, FP, y Battaglia, MA. Una breve medida del equilibrio en la esclerosis múltiple: validación a través del análisis Rasch. Neurol funct. (1997) 12:255–65.
55. Jonsson, E, Seiger, A, and Hirschfeld, H. Postural steadiness and weight distribution during tandem stance in healthy young and elderly adults. Clin Biomech (Bristol, Avon). (2005) 20:202–8. doi: 10.1016/j.clinbiomech.2004.09.008
Resumen de PubMed | Texto completo de CrossRef | Google Académico
56. Mouzat, A, Dabonneville, M, y Bertrand, P. El efecto de la posición de los pies en la postura ortostática en un grupo de muestra femenina. Neurosci Lett. (2004) 365:79–82. doi: 10.1016/j.neulet.2004.04.062
Resumen de PubMed | Texto completo de CrossRef | Google Académico
57. Fujimoto, M, Hsu, W-L, Woollacott, MH, y Chou, L-S. La fuerza del dorsiflexor del tobillo se relaciona con la capacidad de restablecer el equilibrio durante una traslación de la superficie de apoyo hacia atrás. Postura de la marcha. (2013) 38:812–7. doi: 10.1016/j.gaitpost.2013.03.026
Resumen de PubMed | Texto completo de CrossRef | Google Académico
58. King, MB, Judge, JO, y Wolfson, L. La base funcional de apoyo disminuye con la edad. J Gerontol. (1994) 49:M258–63. doi: 10.1093/geronj/49.6.m258
59. Coates, JC. «Opciones de evaluación y rehabilitación para trastornos ortopédicos del miembro pélvico». En: C Zink y JB Dykevan, editores. Medicina deportiva canina y rehabilitación. Hoboken, NJ: Wiley Blackwell (2018).
60. Frye, C, Carr, BJ, Lenfest, M, and Miller, A. Canine geriatric rehabilitation: considerations and strategies for assessment, functional scoring, and follow-up. Front Vet Sci. (2022) 9:842458. DOI: 10.3389/FVETS.2022.842458
Resumen de PubMed | Texto completo de CrossRef | Google Académico
61. Moreira, JP, Tichy, A, y Bockstahler, B. Comparación de la distribución vertical de la fuerza en las patas de perros con coxartrosis y perros sanos caminando sobre una placa de presión. Animales. (2020) 10:60986. DOI: 10.3390/ANI10060986
Resumen de PubMed | Texto completo de CrossRef | Google Académico
62. Braun, L, Tichy, A, Peham, C, and Bockstahler, B. Comparison of vertical force redistribution in the pads of dogs with elbow osteoarthritis and healthy dogs. Veterinario J. (2019) 250:79–85. doi: 10.1016/j.tvjl.2019.06.004
Resumen de PubMed | Texto completo de CrossRef | Google Académico
63. Roush, JK, y McLaughlin, RM. Efectos del tiempo y la velocidad de la postura del sujeto en las fuerzas de reacción del suelo en galgos clínicamente normales en la caminata. Am J Vet Res. (1994) 55:1672–6.
64. Hans, EC, Zwarthoed, B, Seliski, J, Nemke, B, and Muir, P. Variance associated with subject velocity and trial repetition during force platform gait analysis in a heterogeneous population of clinically normal dogs. Veterinario J. (2014) 202:498–502. doi: 10.1016/j.tvjl.2014.09.022
Resumen de PubMed | Texto completo de CrossRef | Google Académico
65. Conzemius, MG, Torres, BT, Muir, P, Evans, R, Krotscheck, U, and Budsberg, S. Best practices for measuring and reporting ground reaction forces in dogs. Veterinario Surg. (2022) 51:385–96. DOI: 10.1111/VSU.13772
Resumen de PubMed | Texto completo de CrossRef | Google Académico
66. Allcare Innovations Imoove®vet guide Mise en route & Utilisation: Le soin par le movement. (2020).
67. Nickel, R, Schummer, A, y Seiferle, E. Lehrbuch der Anatomie der Haustiere. Berlín, Hamburgo: Parey (2004). 625 págs.
68. Schwarz, N, Tichy, A, Peham, C, and Bockstahler, B. Vertical force distribution in the paws of sound Labrador retrievers during walking. Veterinario J. (2017) 221:16–22. doi: 10.1016/j.tvjl.2017.01.014
Resumen de PubMed | Texto completo de CrossRef | Google Académico
69. Besançon, MF, Conzemius, MG, Evans, RB y Ritter, MJ. Distribución de fuerzas verticales en las almohadillas de galgos y labradores retrievers durante la marcha. Am J Vet Res. (2004) 65:1497–501. doi: 10.2460/ajvr.2004.65.1497
Resumen de PubMed | Texto completo de CrossRef | Google Académico
70. Souza, AN, Pinto, AC, Marvulle, V, y Matera, JM. Evaluación de fuerzas verticales en las almohadillas de perros pastores alemanes. Vet Comp Orthop Traumatol. (2013) 26:06–11. doi: 10.3415/VCOT-11-07-0100
Resumen de PubMed | Texto completo de CrossRef | Google Académico
71. Winter, DA, Prince, F, Frank, JS, Powell, C, y Zabjek, KF. Teoría unificada sobre el equilibrio a/p y m/l en postura tranquila. J Neurophysiol. (1996) 75:2334–43. DOI: 10.1152/JN.1996.75.6.2334
Resumen de PubMed | Texto completo de CrossRef | Google Académico
72. Suomi, R, y Koceja, DM. Patrones de balanceo postural de hombres y mujeres normales y hombres con retraso mental durante una prueba de postura de dos piernas. Arch Phys Med Rehabil. (1994) 75:205–9. doi: 10.1016/0003-9993(94)90397-2
Resumen de PubMed | Texto completo de CrossRef | Google Académico
73. Błaszczyk, JW, Beck, M, y Sadowska, D. Evaluación de la estabilidad postural en sujetos jóvenes sanos basada en características direccionales de datos posturográficos: efectos de visión y género. Acta Neurobiol Exp. (2014) 74:433–42.
74. Gomes-Costa, M, Roupa, I, Pequito, M, Prazeres, J, Gaivão, M, Abrantes, J, et al. El uso de placas de presión para el centro estático de análisis de presión en caballos. J Veterinario Equino. (2015) 35:315–20. doi: 10.1016/j.jevs.2015.02.002
75. Kanekar, N, y Aruin, AS. Envejecimiento y control del equilibrio en respuesta a perturbaciones externas: papel de los mecanismos posturales anticipatorios y compensatorios. Edad. (2014) 36:9621. DOI: 10.1007/S11357-014-9621-8
Resumen de PubMed | Texto completo de CrossRef | Google Académico
76. Wittek, K, y Bockstahler, B. Aktive therapeutische Übungen En: B Bockstahler, K Wittek, D Levine, J Maierl, y DL Millis, editores. Physikalische Medizin, Rehabilitation und Sportmedizin auf den Punkt gebracht: Ein Leitfaden für die Kleintierpraxis. Babenhausen: EBV (2022)
77. McCauley, L, y van Dyke, JB. «Ejercicio terapéutico». En: C Zink y JB Dykevan, editores. Medicina deportiva canina y rehabilitación. Hoboken, NJ: Wiley Blackwell (2018).
78. Sellon, DC, y Marcellin-Little, DJ. Factores de riesgo para la rotura del ligamento cruzado craneal en perros que participan en la agilidad canina. BMC Vet Res. (2022) 18:39. doi: 10.1186/s12917-022-03146-2
Resumen de PubMed | Texto completo de CrossRef | Google Académico
79. McKenzie, BA, y Chen, FL. Evaluación y manejo de la disminución de la función física en perros de edad avanzada. Top Companion Anim Med. (2022) 51:100732. doi: 10.1016/j.tcam.2022.100732
Resumen de PubMed | Texto completo de CrossRef | Google Académico
80. Handelzalts, S, Kenner-Furman, M, Gray, G, Soroker, N, Shani, G, and Melzer, I. Effects of perturbation-based balance training in subacute persons with stroke: a randomized controlled trial. Reparación neurorrehabil neural. (2019) 33:213–24. doi: 10.1177/1545968319829453
Resumen de PubMed | Texto completo de CrossRef | Google Académico
81. Mansfield, A, Aqui, A, Danells, CJ, Knorr, S, Centen, A, DePaul, VG, et al. ¿El entrenamiento del equilibrio basado en perturbaciones previene las caídas entre las personas con accidente cerebrovascular crónico? Un ensayo controlado aleatorio. BMJ Abierto. (2018) 8:E021510. DOI: 10.1136/BMJOPEN-2018-021510
Resumen de PubMed | Texto completo de CrossRef | Google Académico
Palabras clave: equilibrio canino, centro de presión, estabilidad postural, posturografía, rehabilitación veterinaria, perturbaciones mecánicas externas
Cita: Lutonsky C, Peham C, Mucha M, Reicher B, Gaspar R, Tichy A y Bockstahler B (2023) Las perturbaciones mecánicas externas desafían la estabilidad postural en perros. Frente. Vet. Sci. 10:1249951. doi: 10.3389/fvets.2023.1249951
Editado por:
Muhammad Saqib, Universidad de Agricultura, Faisalabad, Pakistán
Revisado por:
Alison Wills, Universidad de Hartpury y Hartpury College, Reino Unido
João Carlos Alves, Universidad de Évora, Portugal
Derechos de autor © 2023 Lutonsky, Peham, Mucha, Reicher, Gaspar, Tichy y Bockstahler. Este es un artículo de acceso abierto distribuido bajo los términos de la Licencia de Atribución Creative Commons (CC BY).
*Correspondencia: Christiane Lutonsky, christiane.lutonsky@vetmeduni.ac.at
Renuncia: Todas las afirmaciones expresadas en este artículo son únicamente las de los autores y no representan necesariamente las de sus organizaciones afiliadas, o las del editor, los editores y los revisores. Cualquier producto que pueda ser evaluado en este artículo o reclamo que pueda ser hecho por su fabricante no está garantizado ni respaldado por el editor.
Date de alta y recibe nuestro 👉🏼 Diario Digital AXÓN INFORMAVET ONE HEALTH
Date de alta y recibe nuestro 👉🏼 Boletín Digital de Foro Agro Ganadero
Noticias animales de compañía
Noticias animales de producción
Trabajos técnicos animales de producción
Trabajos técnicos animales de compañía