
Validación para analizar la fiabilidad de los datos del centro de presión en posturografía estática en perros

Un estudio de validación para analizar la fiabilidad de los datos del centro de presión en posturografía estática en perros
 Masoud Aghapour1*†
Masoud Aghapour1*†  Nadja Affenzeller1,2†
Nadja Affenzeller1,2†  Christiane Lutonsky1
Christiane Lutonsky1  Christian Peham3
Christian Peham3  Alexander Tichy4
Alexander Tichy4  Bárbara Bocksthler1
Bárbara Bocksthler1- 1Sección de Fisioterapia, Cirugía de Pequeños Animales, Departamento de Animales de Compañía y Caballos, Universidad de Medicina Veterinaria, Viena, Austria
- 2Unidad Clínica de Medicina Interna de Pequeños Animales, Departamento de Animales de Compañía y Caballos, Universidad de Medicina Veterinaria, Viena, Austria
- 3Grupo de Ciencias del Movimiento, Cirugía Equina, Departamento de Animales de Compañía y Caballos, Universidad de Medicina Veterinaria, Viena, Austria
- 4Plataforma Bioinformática y Bioestadística, Departamento de Servicios Biomédicos, Universidad de Medicina Veterinaria, Viena, Austria
Introducción: Los parámetros del centro de presión (COP) se evalúan con frecuencia para analizar los trastornos del movimiento en humanos y animales. Las discrepancias metodológicas son una preocupación importante cuando se evalúan los resultados contradictorios de los estudios. Este estudio tuvo como objetivo evaluar la fiabilidad interobservador y la fiabilidad test-retest de los parámetros corporales de COP, incluido el balanceo mediolateral y craneocaudal, la longitud total, la velocidad media y la superficie de apoyo en perros sanos durante una parada tranquila en una placa de presión. Además, se trataba de determinar el número mínimo de ensayos y la duración más corta necesaria para una evaluación precisa de la COP.
Materiales y métodos: Doce perros clínicamente sanos se sometieron a tres ensayos repetidos, que fueron analizados por tres observadores independientes para evaluar la fiabilidad entre observadores. Se evaluó la fiabilidad test-retest en los tres ensayos por perro, cada uno con una duración de 20 segundos. Las mediciones seleccionadas de 20 s se analizaron de seis maneras diferentes: 1 × 20 s, 1 × 15 s, 2 × 10 s, 4 × 5 s, 10 × 2 s y 20 × 1 s.
Resultados: Los resultados demostraron una excelente fiabilidad interobservador (ICC ≥ 0,93) para todos los parámetros de COP. Sin embargo, solo las mediciones de 5, 10 s y 15 s alcanzaron el umbral de confiabilidad (ICC ≥ 0,60) para todos los parámetros evaluados.
Discusión: Las duraciones repetibles más cortas se obtuvieron a partir de dos mediciones de 5 s o de una sola medición de 10 s. Lo más importante es que se observaron diferencias estadísticamente significativas entre las diferentes duraciones de medición, lo que subraya la necesidad de estandarizar los tiempos de medición en el análisis COP. Los resultados de este estudio ayudan a los científicos a implementar métodos estandarizados, facilitando así las comparaciones entre estudios y mejorando la confiabilidad y validez de los hallazgos de la investigación en medicina veterinaria.
1 Introducción
El análisis de la marcha es la herramienta clínicamente más relevante en medicina veterinaria para estudiar la locomoción y diagnosticar trastornos del movimiento en animales como la cojera (1-3). La evaluación de las fuerzas de reacción en el suelo (GRF) de un participante mientras camina o trota sobre una fuerza (4, 5) o una placa de presión (1, 3) se considera el estándar de oro para el diagnóstico objetivo de cojera (2, 6, 7). En los últimos años, estos sistemas no solo se han utilizado para detectar cojeras de una forma más cuantificable y fiable, sino también para estudiar el equilibrio postural en diferentes especies (2).
El equilibrio postural se basa en la integración de la información sensorial de los sistemas propioceptivo, visual y vestibular junto con activaciones musculares adaptativas coordinadas dentro del sistema nervioso central (8, 9). El equilibrio en sí se mantiene mediante contracciones musculares, que actúan contra la gravedad, y forma la base de muchas actividades diarias, como caminar y estar de pie. Por lo tanto, quedarse quieto es un proceso activo y controlado, influenciado por las señales sensoriomotoras antes mencionadas. Las deficiencias en cualquiera de estos sistemas pueden afectar negativamente la estabilidad postural en los seres humanos (10, 11). Por lo tanto, el estudio del equilibrio postural proporciona información valiosa sobre las interacciones entre estos sistemas.
Un método importante para estudiar la estabilidad postural durante la marcha y el trote (posturografía dinámica) o la bipedestación tranquila (posturografía estática) es el centro de presión (COP) del cuerpo y/o de cada extremidad. Incluso cuando está parado, el cuerpo se mueve constantemente en las direcciones craneocaudal (antero-posterior en humanos) y mediolateral. Por lo tanto, el centro de gravedad del cuerpo y el centro de masa (COM) continúan moviéndose para mantener el COM dentro de la base de apoyo para evitar caídas. Las contracciones musculares controladas cambian la repartición de la fuerza debajo del cuerpo, lo que resulta en fluctuaciones continuas del COP con el objetivo de mantener el COM en una posición bastante constante. En consecuencia, el COP debajo de los pies o patas se desplaza permanentemente (12, 13). El COP es el punto en el que se aplica el vector instantáneo del GRF (12), de modo que el desplazamiento del COP es una medida indirecta de la funcionalidad de la estabilidad postural y, por tanto, una medida de la capacidad de mantener el equilibrio. El rendimiento del control postural suele evaluarse mediante la cuantificación de las medidas basadas en COP del balanceo postural durante una postura tranquila (14). Así, por ejemplo, se asumen valores de COP más bajos para una mejor estabilidad en la posturografía estática (12, 15).
No en vano, los científicos en medicina veterinaria utilizaron los parámetros COP no solo para estudiar la influencia de diferentes demandas físicas en perros clínicamente sanos (16, 17), sino también para evaluar el efecto de diferentes trastornos ortopédicos como la displasia de cadera (18, 19), la displasia de codo (13, 15, 19, 20), la rotura del ligamento cruzado craneal (15), y diferentes trastornos neurológicos como las lesiones medulares toracolumbares (21, 22). Recientemente, la posturografía estática se ha utilizado para evaluar las distribuciones de peso corporal, los índices de simetría izquierda-derecha y el efecto de la raza y la edad (23-25).
A la vista de estas preguntas de investigación de gran relevancia, los métodos ya publicados por los distintos autores varían enormemente. El análisis de GRF (23, 26-32) y COP (2, 13, 15, 20, 25, 33-46) durante las mediciones estáticas en placas de presión y fuerza se ha realizado en numerosas publicaciones veterinarias. A pesar de seguir un principio común en el que se motivaba a los animales a permanecer quietos durante un período predeterminado sin movimientos de la cabeza y los pies, en la literatura se observa una amplia variedad de técnicas, especialmente en lo que respecta a la duración y el número de ensayos. La duración de la medición oscila entre 30 s (34) y 1 s (25, 41), siendo la elección más común para la duración de un ensayo en la evaluación del GRF (26, 27, 30) y el COP tanto en perros (20, 35, 37) como en caballos (39, 42, 44) siendo un período de 10 s por ensayo. Asimismo, el número de repeticiones varía de 1 (25, 41) a 8 (33, 45), mientras que algunos autores establecen un rango o un mínimo de repeticiones (23, 33, 37, 41, 44). Las combinaciones más utilizadas para la medición de la COP en perros son los períodos continuos de 20 s (13, 15) y 10 s (20, 35) repetidos tres veces (para obtener más información, consulte la descripción general en la Tabla suplementaria 1). Sin embargo, hasta el momento no se ha publicado ningún consenso científico, especialmente en lo que respecta a la duración mínima de la medición y el número mínimo de ensayos en posturografía estática.
Esta variabilidad en la metodología puede afectar los resultados informados, lo que dificulta la comparación precisa de los hallazgos en diferentes estudios y diferentes especies. Sin embargo, la identificación y evaluación de los posibles factores de confusión es crucial para obtener resultados fiables y sólidos de la COP. Es por eso que, en este estudio, nos propusimos evaluar la confiabilidad inter-observador y la confiabilidad test-retest de los parámetros COP corporales de perros durante la bipedestación tranquila (posturografía estática) en una placa de presión. Además, adhiriéndonos al principio de las 3R (Reemplazo, Reducción y Refinamiento), nuestro objetivo era determinar el número mínimo de ensayos y la duración más corta necesaria para garantizar un alto nivel de precisión en los datos de COP evaluados. Creemos que esto se alinea con los principios de refinamiento en los ensayos con animales (47).
2 Materiales y métodos
2.1 Aprobación y consentimiento
Este estudio fue aprobado por el Comité de Ética y Bienestar Animal de la Universidad de Medicina Veterinaria de Viena de acuerdo con las directrices de la Universidad para las Buenas Prácticas Científicas y la legislación nacional (ETK-148/10/2021).
2.2 Animales
Un total de 26 perros propiedad de clientes fueron evaluados en este estudio. Los criterios de inclusión consistieron en la ausencia de cualquier enfermedad clínica musculoesquelética, neurológica o visual; por lo tanto, todos los perros se sometieron a un examen clínico general por veterinarios calificados (MA, NA, CL) que incluyó la evaluación visual de la marcha, la palpación articular y el cálculo del índice de simetría (IS). Un perro fue excluido del estudio debido a hallazgos anormales en el examen clínico, y otros 13 perros fueron excluidos debido a la incapacidad de permanecer quietos durante un mínimo de 30 s. Como resultado, se incluyeron 12 perros sanos en este estudio. La raza de los perros consistió en Labrador retriever (n = 4), border collie (n = 2), caniche estándar, perro perdiguero de pelo plano, malinois, terrier irlandés, pointer y 1 perro mestizo. El peso corporal y la edad de los perros oscilaron entre 32,5 y 13,5 kg (22,68 ± 5,43) y entre 6,0 y 1,11 años (3,39 ± 1,79), respectivamente. Cinco perros eran machos (todos intactos) y siete perros hembras (cinco intactos y dos esterilizados). Todos los perros tenían que pesar más de 10 kg para ser incluidos en el estudio.
2.3 Equipo y procedimiento de medición
En este estudio prospectivo, los parámetros COP de los perros se midieron en una posición tranquila de pie sobre un terreno llano utilizando una plataforma Zebris (FDM Tipo 2, Zebris Medical GmbH, Allgäu, Alemania) equipada con 15.360 sensores que cubren un área de 203 × 54,2 cm y una frecuencia de medición de 100 Hz. El tamaño del sensor de las plataformas fue de 0,72 × 0,72 cm. Para estandarizar el coeficiente de fricción, la placa de presión se cubrió con una estera de goma antideslizante negra de 1 mm de espesor hecha de cloruro de polivinilo. Todos los procedimientos de medición se filmaron con una cámara Panasonic NV-MX500 (Panasonic, Kadoma, Osaka, Japón) con una configuración estandarizada para el posicionamiento y el ángulo de la cámara. La cámara se colocó a 3,5 m del origen (coordenada 0,0) de la plataforma en un ángulo de 35° con respecto al lado largo de la plataforma, para capturar tanto las vistas sagitales como las frontales. Se colocó a una altura de 0,85 m con un ángulo de 90° para garantizar una cobertura completa del área observada (Figura complementaria 1).
En este estudio, la evaluación del IS durante el paseo y la posturografía de los perros incluidos fue realizada por diferentes observadores (MA, NA o CL). Una vez que se confirmó que el IS se encontraba dentro de un rango aceptable (SI < 3%), uno de los observadores mencionados registró posturografías, que consistieron en tres ensayos (M1-M3) para cada perro. Posteriormente, cada uno de los tres observadores analizó de forma independiente los datos registrados del ensayo y definió el punto de partida para la duración de la medición de 20 s para cada perro por separado.
2.3.1 Evaluación del índice de simetría durante la marcha
Con el fin de familiarizar a los perros con la habitación, la configuración y el equipo, se les permitió deambular libremente durante un máximo de 15 minutos. Una vez que los perros se familiarizaron con la habitación, se midió el GRF al caminar en línea recta utilizando la placa de presión mencionada anteriormente. Se analizaron al menos cinco pasadas válidas para calcular el SI para la fuerza vertical máxima (PFz) y el impulso vertical (IFz) según lo reportado en la literatura (17, 19, 48). Un pase válido se definió como una caminata en la que el perro cruzó el plato sin cambiar de ritmo, girar la cabeza, tirar de la correa o tocar al guía del perro (MA, NA o CL). La diferencia de velocidad a la que los perros cruzaban la placa tenía que estar dentro de un rango de ± 0,3 m/s y una aceleración de ± 0,5 m/s2 (7, 49 y 50). El SI para PFz e IFz de todos los perros incluidos en este estudio fue inferior al 3%, que es el margen que se utiliza normalmente para distinguir entre un patrón de marcha sano y asimétrico (17, 19, 48).
2.3.2 Posturografía
Después de un breve descanso, se midieron los parámetros COP (ver detalles en la Sección 2.4) para cada perro. Los perros tenían que permanecer quietos en la plataforma de presión con todas las extremidades perpendiculares a la plataforma. Cada prueba duró un mínimo de 30 s y se repitió tres veces (M1, M2 y M3) para cada perro. Los perros pudieron tener un descanso entre las pruebas y recibieron golosinas después de cada prueba. Los datos fueron descartados por el observador si se observaron movimientos del cuerpo, la cabeza, la cola, las extremidades o las patas en la grabación de video.
2.4 Análisis de datos
Para la evaluación de los criterios de inclusión se utilizaron los siguientes parámetros:
• La velocidad media (m/s) y la aceleración (m/s2) se calcularon para la extremidad anterior izquierda utilizando los datos de la placa de presión. Para ello, se utilizaron dos impactos consecutivos de la pata (inicio del aterrizaje) en la placa. Se utilizaron las siguientes fórmulas:
° Longitud del paso (distancia en m) = la diferencia entre el centro del área de contacto de la pata del segundo y el primer impacto de la pata (coordenadas de la placa)
° Duración del paso (s) = tiempo entre dos impactos consecutivos de la pata
![]()
° Aceleración (m/s2) = velocidad del segundo paso – velocidad del primer paso
• El índice de simetría (IS) expresado en porcentaje (SI%), se calculó para ambos parámetros (PFz e IFz) de acuerdo con la siguiente ecuación modificada de Budsberg et al. (48):

Donde XFz es el valor medio de la fuerza vertical máxima (PFz) o el impulso vertical (IFz) de los pasos válidos, LLx es la extremidad delantera o posterior izquierda, y RLx es la extremidad delantera o posterior derecha; A la simetría perfecta entre las extremidades delanteras o posteriores derecha e izquierda se le asignó un valor de 0%.
Cada uno de los tres observadores llevó a cabo un análisis separado de los datos de los ensayos registrados. Dentro de cada ensayo, se utilizaron 20 segundos consecutivos para el análisis, elegidos independientemente por cada observador (etiquetados como M1, M2 y M3). En los perros que no permanecieron quietos durante 20 s, se eligió el período válido más largo para el análisis (para más detalles, véase la Tabla 1). Ocho perros completaron las tres pruebas instantáneamente. En el caso de tres perros, se necesitó un ensayo adicional para lograr tres ensayos válidos. Un perro requirió dos ensayos adicionales (en total cinco ensayos). Los datos medidos se analizaron con el software a medida Pressure Analyzer (Michael Schwanda, versión 4.8.7.0). En el siguiente paso, cada secuencia de 20 s de duración fue dividida en seis categorías por cada observador de forma independiente para cada ensayo válido:
• Categoría A: 1 secuencia de 20 s (1 × 20 s).
• Categoría B: 1 secuencia de los mismos 20 s seleccionados con una duración de 15 s (1 × 15 s).
• Categoría C: 2 secuencias de los mismos 20 s seleccionados cada una con una duración de 10 s (2 × 10 s).
• Categoría D: 4 secuencias de los mismos 20 s seleccionados con una duración de 5 s (4 × 5 s cada una).
• Categoría E: 10 secuencias de los mismos 20 s seleccionados, cada una con una duración de 2 s (10 × 2 s).
• Categoría F: 20 secuencias de los mismos 20 s seleccionadas cada una con una duración de 1 s (20 × 1 s).
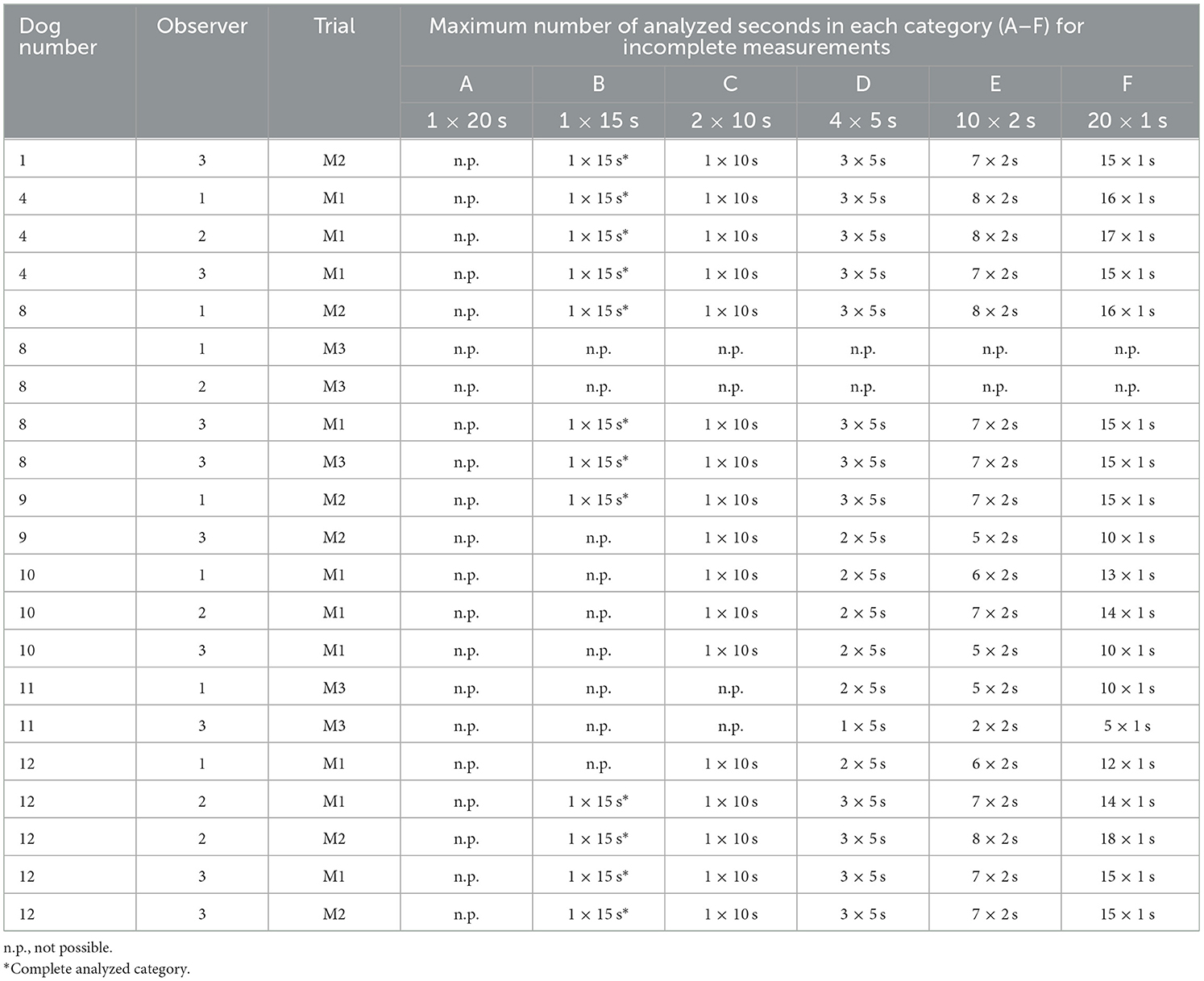 Tabla 1. Resumen de las categorías incompletas por perro analizadas por cada observador.
Tabla 1. Resumen de las categorías incompletas por perro analizadas por cada observador.
Todos los datos de cada perro y ensayo se exportaron como archivos de Excel (Microsoft Excel 2016) para su posterior análisis.
Cálculo del cuerpo COP:
Los sensores de presión se distribuyen por toda la superficie de la placa. Bajo carga (ejercida por las extremidades del perro) cada sensor mide la presión en su ubicación específica. Sobre la base de las mediciones de presión de todos los sensores, se puede calcular la distribución de la presión en toda la placa. A continuación, se calcula el COP utilizando las medias ponderadas de las mediciones de presión, teniendo en cuenta la ubicación de cada sensor y la presión medida. Se utilizan las siguientes fórmulas:
 En este estudio, se calcularon los siguientes parámetros de COP (COP corporal):
En este estudio, se calcularon los siguientes parámetros de COP (COP corporal):
• Desplazamiento mediolateral (DLM) en milímetros (mm).
• Desplazamiento craneocaudal (CCD) en mm.
• Longitud total (L) en metros (m); definida como la longitud de la línea que conecta las coordenadas de la trayectoria de la COP en cada período de tiempo.
• Velocidad media (AS) en mm por segundo; definida como la velocidad media del movimiento de la COP.
• Superficie de apoyo (SS) en mm2; área de la elipse que contiene el 90% de todos los puntos COP.
Todos los datos analizados se ordenaron por número de perros (1-12), observador (1-3), número de ensayo por perro (M1-M3), categoría y duración de cada secuencia (de 1 a 20 s). Como siguiente paso, de cada categoría, se seleccionaron de 1 a 10 secuencias (S1-S10) para cada parámetro COP (para más detalles, consulte la Figura 1).
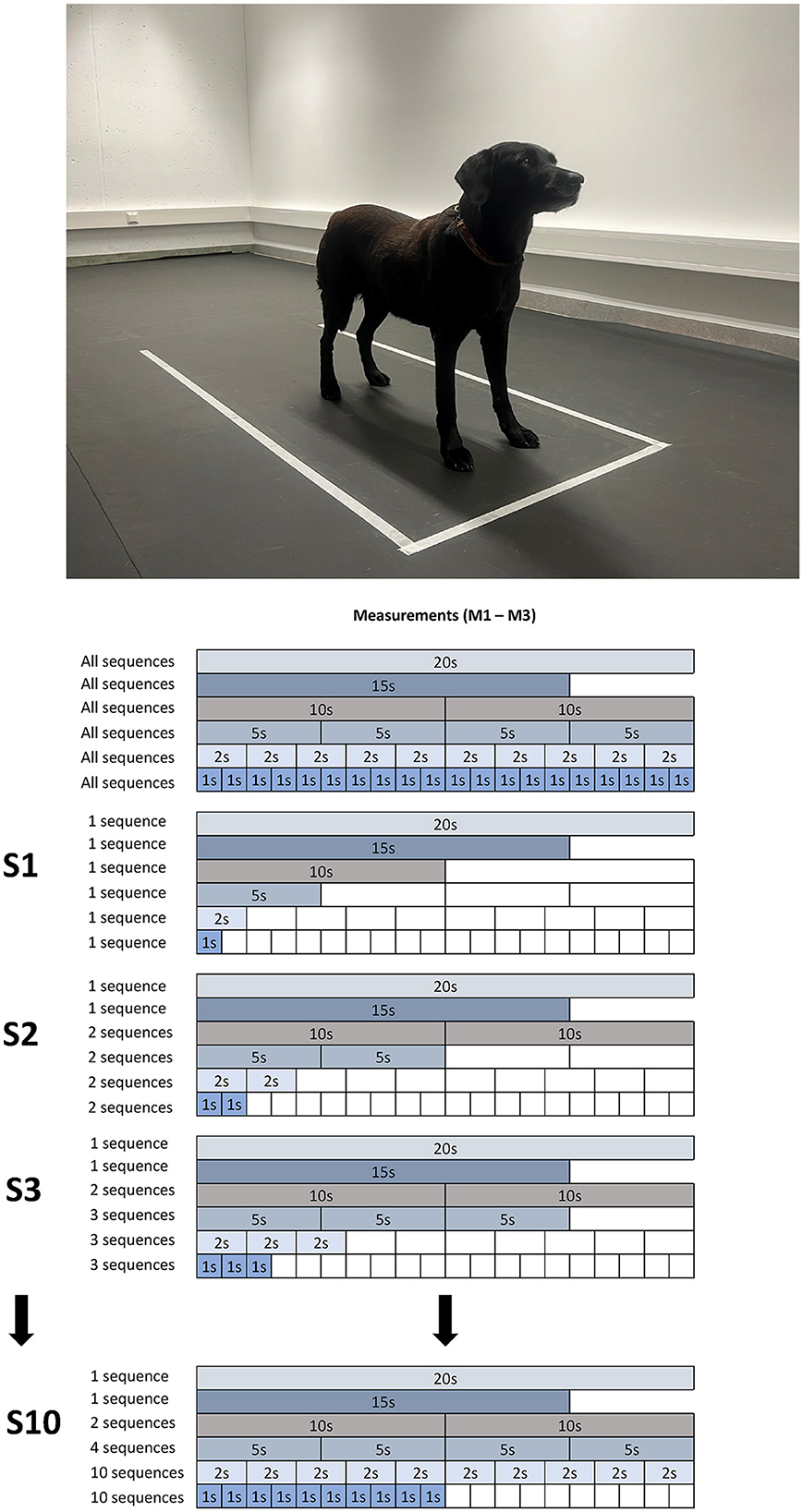 Figura 1. Representación de la selección de las secuencias a examinar utilizando el ejemplo del Perro 11: inicialmente, cada investigador eligió una secuencia de 20 s para cada medición (1-3). Después, se seleccionaron los primeros 15 s, seguidos de dos series de 10 s, cuatro series de 5 s, y así sucesivamente. Esto sirvió de base para la posterior selección escalonada de secuencias: inicialmente, se utilizó la 1ª secuencia respectiva, en el siguiente paso, las dos primeras, luego las tres primeras, y así sucesivamente. El proceso concluyó cuando se alcanzaron 10 secuencias de 1 s cada una.
Figura 1. Representación de la selección de las secuencias a examinar utilizando el ejemplo del Perro 11: inicialmente, cada investigador eligió una secuencia de 20 s para cada medición (1-3). Después, se seleccionaron los primeros 15 s, seguidos de dos series de 10 s, cuatro series de 5 s, y así sucesivamente. Esto sirvió de base para la posterior selección escalonada de secuencias: inicialmente, se utilizó la 1ª secuencia respectiva, en el siguiente paso, las dos primeras, luego las tres primeras, y así sucesivamente. El proceso concluyó cuando se alcanzaron 10 secuencias de 1 s cada una.
En resumen, S1 incluyó la primera medición de la categoría A-F, mientras que S2 incluyó la media calculada de las 2 primeras mediciones de cada categoría (tenga en cuenta que las categorías A y B solo consistieron en 1 conjunto de datos cada una en S2 y a partir de ahí). Este aumento incremental simultáneo por categoría dio lugar a la condición de muestreo máximo S10, que incluía la media de las primeras secuencias de 10 × 1 s de la categoría F, la media de las primeras secuencias de 10 × 2 s de la categoría E, y la media global de las categorías C y D y el conjunto de datos único de las categorías A y B.
El análisis estadístico se realizó con el programa IBM SPSS versión 29 (IBM, Chicago, USA). Se calcularon estadísticas descriptivas para todos los datos de COP, así como para cada secuencia (S1-S10). La distribución normal de los datos de COP obtenidos se validó mediante la prueba de Shapiro-Wilk.
Se utilizó el coeficiente de correlación intraclase (CCI) para evaluar la fiabilidad interobservador de todos los parámetros COP calculados para cada secuencia (S1-S10). Esta evaluación se basó en los datos analizados entre tres observadores (NA, MA y CL). Además, la fiabilidad test-retest del método analítico se determinó mediante un análisis ICC al comparar los tres ensayos (M1-M3) para cada perro por parte de todos los observadores para evaluar la consistencia de los datos de COP entre los ensayos (y, por lo tanto, también a lo largo del tiempo). Además, se utilizó el ICC para evaluar la fiabilidad entre diferentes duraciones de medición (1-20 s) de cada secuencia (S1-S10). El CCI varió de 1 (excelente correlación) a 0 (sin correlación). Un CCI > 0,8 se consideró una correlación excelente, 0,79 > CCI > 0,60 se consideró muy buena correlación, 0,59 > CCI > 0,40 se consideró buena correlación, 0,39 > CCI > 0,20 se consideró cuestionable y un CCI < 0,20 se consideró inaceptable (51). En este estudio, se consideró que se logró una correlación robusta cuando un ICC ≥ 0,60, lo que indica un rango de correlación de muy buena a excelente (51).
Para determinar diferencias significativas entre las duraciones de las mediciones (1-20 s), se llevó a cabo una prueba de análisis de varianza de una vía (ANOVA), seguida de una prueba post-hoc de Bonferroni, empleando un nivel de significación estadística establecido en p < 0,05.
3 Resultados
Entre los 12 perros estudiados, siete perros tenían categorías incompletas, porque no lograron quedarse quietos continuamente durante 20 s en al menos uno de los tres ensayos (M1-M3). Por ejemplo, lograr mediciones válidas sin ningún movimiento de cabeza o cola era imposible para dos observadores en el perro 8. Como resultado, un ensayo (M3) de este perro fue excluido de un análisis adicional. La Tabla 1 muestra el número máximo de segundos analizados en cada categoría para todas las mediciones incompletas para cada perro y observador.
Los estadísticos descriptivos (media ± DE) se muestran en la Tabla 2 para cada secuencia por separado. Si bien la velocidad media (AS) sigue siendo similar en todas las secuencias, todos los demás parámetros COP evaluados aumentan con el aumento de la duración de la medición. Esta observación fue confirmada por un ANOVA; todos los parámetros de COP analizados (excepto la EA) mostraron una diferencia significativa cuando se compararon las duraciones de las mediciones entre sí (p. ej., 1 vs. 2 s, 1 vs. 5 s, 1 vs. 10 s, etc.; para detalles que incluyen todos los valores p, véase la Tabla Suplementaria 2).
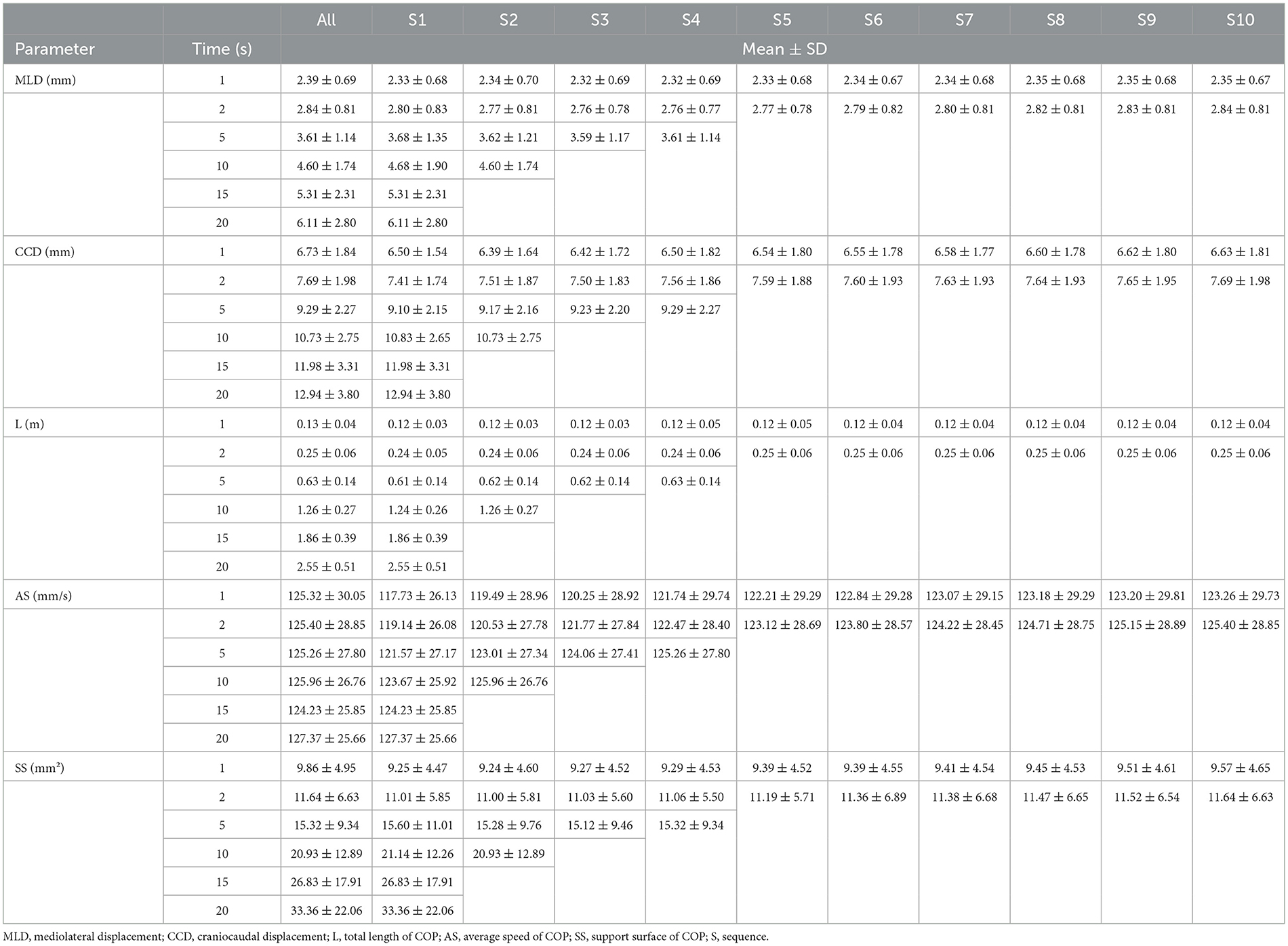 Tabla 2. Estadísticos descriptivos (media ± DE) de todos los parámetros del centro de presión (COP) dentro de cada secuencia a lo largo de varias duraciones de medición.
Tabla 2. Estadísticos descriptivos (media ± DE) de todos los parámetros del centro de presión (COP) dentro de cada secuencia a lo largo de varias duraciones de medición.
3.1 Fiabilidad entre observadores
El ICC de todos los parámetros de COP evaluados entre los tres observadores alcanzó valores entre 0,93 y 0,98 en todas las duraciones de medición y, por lo tanto, se clasificó como excelente fiabilidad entre observadores.
3.2 Fiabilidad test-retest
Cada observador eligió una longitud de 20 s (o, en algunos casos, la duración máxima alcanzable, que es de 15 s) dentro de cada ensayo de forma independiente. Como resultado, no se eligió un punto de partida idéntico para el comienzo de un ensayo. La diferencia en los puntos de partida entre los tres observadores varió de 0,01 a 33,44 s. En el 74% de los ensayos, la diferencia entre los puntos de partida seleccionados fue de entre 0,01 y 5,99 s. Para más detalles, véase el cuadro complementario 3.
El CCI entre los tres ensayos (M1-M3) varió enormemente y dependió de la duración de la medición y del número de secuencias analizadas (Tabla 3). El ICC más bajo se observó al evaluar la DLM al comparar 1 secuencia (S1) con una duración de 1 s (ICC 0,18). El CCI más alto se registró para la DCC cuando se comparó 1 secuencia (S1) con una duración de 20 s (CCI 0,82). A pesar de este alto ICC de CCD en la medición de la duración de 20 s, L y AS nunca alcanzaron el umbral >0,6, lo que indica una baja fiabilidad test-retest de estos dos parámetros durante el período de 20 s.
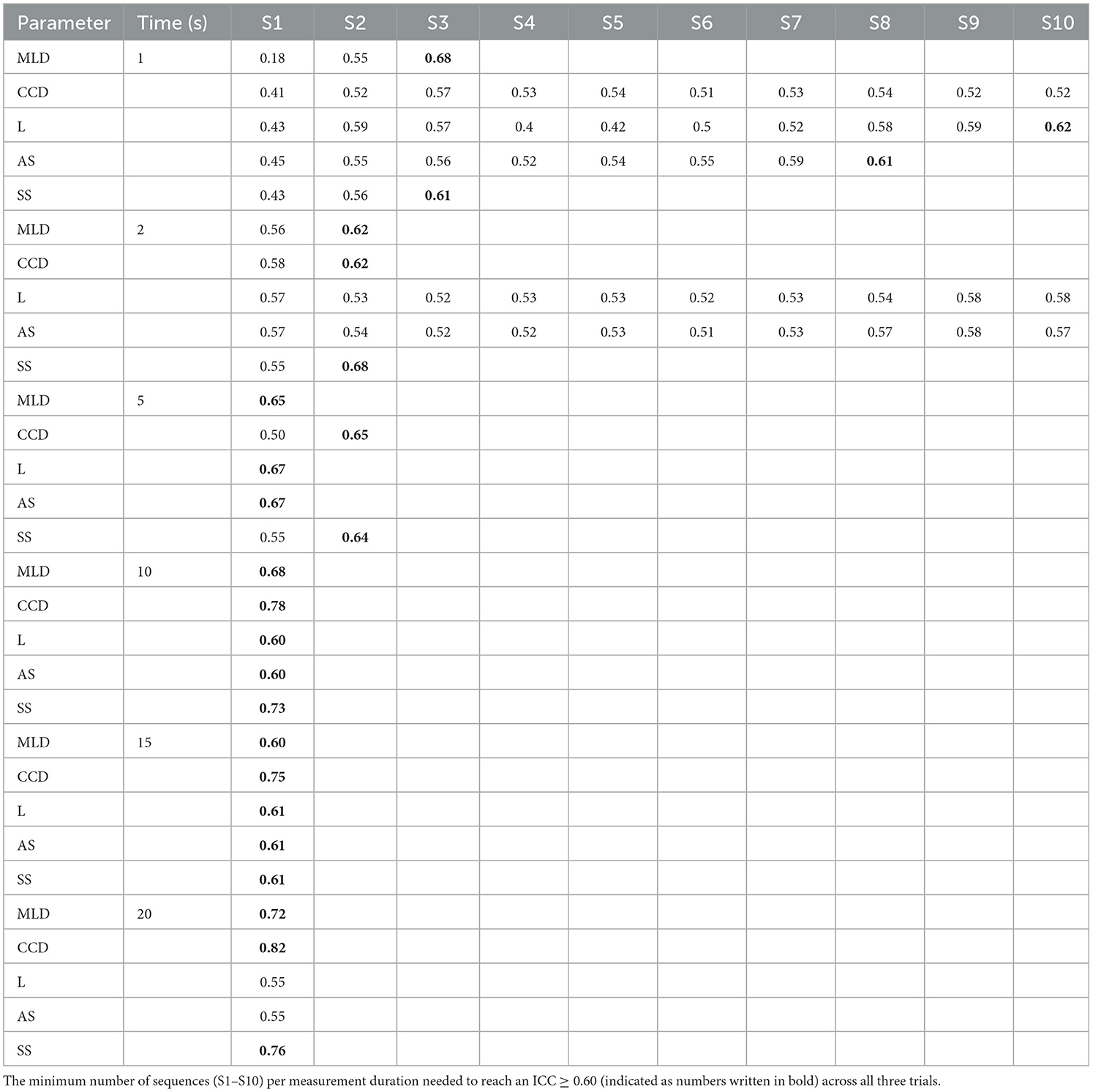 Tabla 3. Fiabilidad test-retest entre tres mediciones (M1-M3).
Tabla 3. Fiabilidad test-retest entre tres mediciones (M1-M3).
Al investigar el número mínimo de secuencias necesarias para cada duración de medición, se observó que solo en la duración de 5, 10 y 15 s todos los parámetros de COP alcanzaron el umbral (ICC ≥ 0,60). Sin embargo, para que el CCD y el SS fueran fiables en la duración de 5 s se necesitaron dos secuencias (2 por 5 s), mientras que en la duración de 10 y 15 s, una sola secuencia fue suficiente. En todas las demás duraciones de medición, al menos un parámetro (p. ej., CCD en la medición de 1 s) y, en algunos casos, dos parámetros (p. ej., L y AS en las mediciones de 2 y 20 s) no alcanzaron el umbral en ninguna de las secuencias analizadas (S1-S10, véase el Cuadro 3).
El Cuadro 4 ilustra el número mínimo de secuencias necesarias para que cada parámetro cumpla el umbral definido. En resumen, se observó que al menos uno de los parámetros COP en las duraciones de 1, 2 y 20 s no alcanzó el umbral. En las duraciones de 5 s, una secuencia fue suficiente para MLD, L y AS, mientras que para CCD y SS, se tuvieron que usar dos secuencias. En todos los parámetros COP, una secuencia fue suficiente para las duraciones de 10 y 15 s.
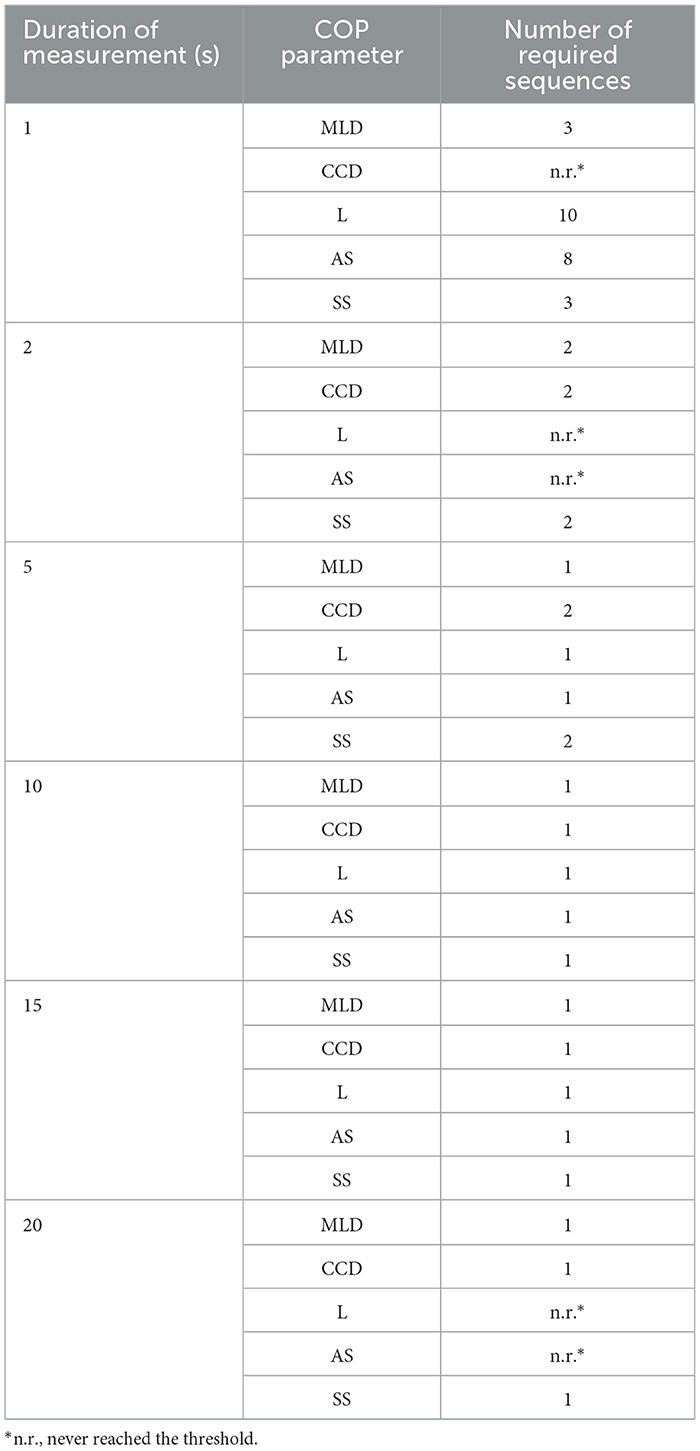 Tabla 4. Ilustración del número mínimo de secuencias necesarias para alcanzar el umbral (ICC ≥ 0,60).
Tabla 4. Ilustración del número mínimo de secuencias necesarias para alcanzar el umbral (ICC ≥ 0,60).
3.3 Correlación entre la duración y las secuencias de las mediciones
En el paso final, investigamos la correlación entre las duraciones de las mediciones y todas las secuencias (S1-S10) entre sí (p. ej., 1 s, S1 vs. 2 s, S1; 1 s, S1 vs. 5 s, S1; 1 s, S1 vs. 10 s, S1; para más detalles, véase la Tabla 5). En general, el ICC tiende a disminuir cuanto más se desvían las duraciones de las mediciones entre sí. Se logró consistentemente un ICC de muy bueno a excelente (para los 5 parámetros COP) cada vez que la duración de la medición se duplicó como máximo (p. ej., 1 vs. 2 s; 5 vs. 10 s; 10 vs. 20 s, pero no 1 vs. 5 s). Al analizar el número de secuencias (S1-S10), las secuencias individuales (S1) ya alcanzaron un muy bueno y excelente CCI en 1 s S1 frente a 2 s S1 (ICC 0,74-0,95), 5 s S1 frente a 10 s S1 (ICC 0,72-0,94), 10 s S1 frente a 15 s S1 (ICC 0,71-0,90), 15 s S1 frente a 20 s S1 (ICC 0,87-0,99), y 10 s S1 vs. 20 s S1 (ICC 0,77-0,96).
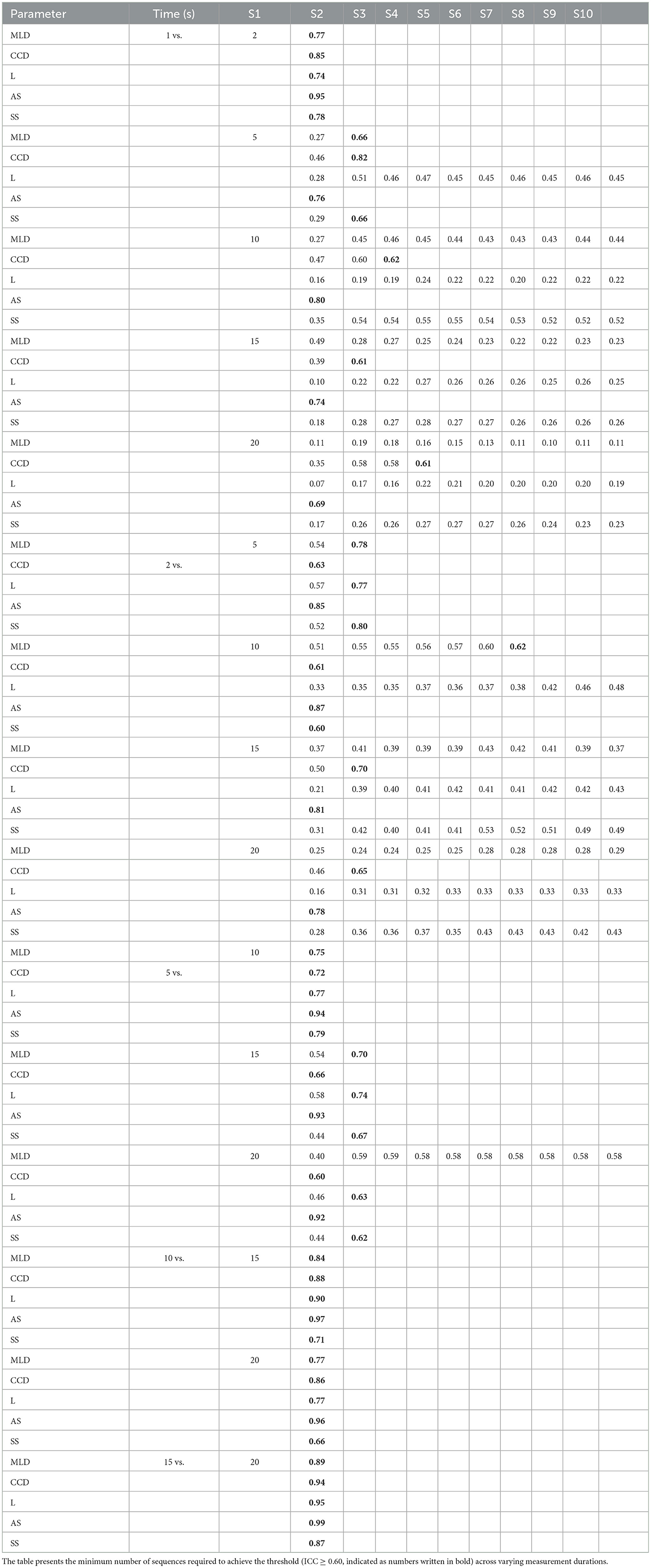 Tabla 5. Ilustración del ICC entre las duraciones de medición individuales para cada parámetro COP.
Tabla 5. Ilustración del ICC entre las duraciones de medición individuales para cada parámetro COP.
Sin embargo, cuando se evaluaron diferencias mayores en la duración de la medición, el número de parámetros COP que alcanzaron el umbral disminuyó continuamente. Por ejemplo, cuando se comparan las mediciones de 1 s con las mediciones de 10, 15 y 20 s, solo dos parámetros COP alcanzaron el umbral (CCD y AS), mientras que tres parámetros nunca alcanzaron el umbral en ninguna de las secuencias. Cabe destacar que el AS y el CCD cumplieron sistemáticamente con el ICC requerido cuando se compararon todas las duraciones de medición entre sí en una de las secuencias analizadas.
4 Discusión
En este estudio, evaluamos la fiabilidad interobservador y la fiabilidad test-retest de los parámetros corporales COP de perros sanos jóvenes y de mediana edad durante una parada tranquila en una placa de presión. Además, nuestro objetivo fue determinar el número mínimo de ensayos necesarios y la duración de medición más corta necesaria para obtener datos de COP fiables y comparables.
El estudio demostró una excelente fiabilidad interobservador para todos los parámetros de COP, demostrando la reproducibilidad del período de tiempo analizado dentro de cada ensayo a través de diferentes observadores. Además, de acuerdo con la fiabilidad test-retest de tres conjuntos de ensayos, lograr una correlación de muy buena a excelente requiere un mínimo de dos mediciones de 5 s o una sola medición de 10 o 15 s.
La fiabilidad test-retest sirve como medida para evaluar la consistencia o estabilidad de una medida o prueba a lo largo del tiempo, evaluando si las evaluaciones repetidas de los mismos individuos producen resultados similares en condiciones consistentes. Al evaluar la fiabilidad test-retest en los tres ensayos repetidos (M1 vs. M2 vs. M3) para cada perro, pudimos demostrar que solo la duración de la medición de 5, 10 y 15 s cumplió con el umbral predeterminado (ICC ≥ 0,60) en todos los parámetros COP evaluados. En todas las demás duraciones de medición (1, 2 y 20 s), 1 o 2 parámetros COP no cumplieron con el criterio ICC en todas las secuencias analizadas. El número mínimo requerido de secuencias era de dos secuencias para los 5 s y una secuencia para los 10 y 15 s de duración, respectivamente.
Encontrar la duración de medición más corta para obtener parámetros COP fiables no solo está en consonancia con el principio de las 3R, ya que hace hincapié en la reducción y el perfeccionamiento de los ensayos con animales (47), sino que también tiene una importancia práctica crucial. Quedarse quieto durante el tiempo suficiente se afirma repetidamente que es una de las tareas más desafiantes en la literatura de posturografía estática (25). En nuestra propia experiencia, permanecer inmóvil es especialmente difícil para los perros jóvenes no entrenados y los perros ancianos que se enfrentan a ciertas condiciones clínicas, como las enfermedades neurodegenerativas. Encontrar la duración de medición necesaria más corta también ayudaría a los científicos a evaluar diferentes especies, en particular animales salvajes como elefantes (41) y flamencos (38) que podrían no permanecer quietos durante períodos prolongados. Hasta donde sabemos, ningún artículo de investigación ha intentado identificar la duración de medición más corta, reproducible y repetible para los parámetros COP en medicina veterinaria. De hecho, la literatura veterinaria documenta una amplia gama de duraciones y repeticiones de las mediciones cuando se evalúan los datos de COP en posturografía estática. Si bien la mayoría de estos artículos se centran en perros (13, 15, 20, 25, 34-37) y caballos (2, 39, 42-45, 52), otros también exploran especies como gatos (53), elefantes (41), flamencos (38) y ratas (54). La mayor duración analizada entre estos artículos fue de 30 s en perros (34), seguida de 20 s en perros (13, 15, 36) y ponis (2) y 15 s en caballos (52); Todos estos trabajos mencionados utilizaron tres repeticiones. Sin embargo, en varios artículos se analizaron períodos aún más cortos. En algunos artículos, las mediciones de 10 s se repitieron de 3 (20, 35) a 5 (39, 42) veces, mientras que en otra literatura se midieron duraciones aún más cortas, como 5 s (46), 3 s (23) o 1 s (25, 41).
Nuestros hallazgos indican que dos mediciones de 5 s o una sola medición de 10 s son las duraciones de medición más cortas con resultados reproducibles que producen un muy buen ICC. Por lo tanto, basándonos en nuestros resultados, recomendamos encarecidamente que los estudios futuros implementen un protocolo más estandarizado y verificado, no solo para reducir el impacto y las posibles implicaciones para el bienestar de los participantes del estudio, sino también para hacer que los resultados del estudio sean más comparables dentro de las especies y, potencialmente, entre ellas.
A pesar de estos resultados altamente relevantes, es necesario señalar que, con base en los resultados del ANOVA, se encontraron diferencias estadísticamente significativas entre todas las duraciones de medición para todos los parámetros de COP (excepto AS). Esto significa que, a pesar de correlaciones de muy buenas a excelentes, los parámetros de COP que se han evaluado durante un período de 5 s no se pueden comparar directamente con los parámetros de COP evaluados durante 10 s dentro del mismo animal y entre los participantes del estudio. Por lo tanto, al analizar los parámetros de COP, sugerimos utilizar duraciones de medición idénticas (por ejemplo, dos veces 5 s o una vez 10 s) para todos los perros que participan en el mismo estudio.
Al emplear diferentes métodos analíticos para los datos de COP en posturografía estática dentro de este estudio, se obtuvieron resultados significativamente diferentes. Lo más sorprendente es que esto incluyó la duración de la medición de 20 s, que es uno de los protocolos más utilizados (analizando tres veces 20 s) publicado (13, 15, 36). A pesar de las altas correlaciones entre los tres ensayos (M1-M3) para la DCC, la DLM y la SS (0,72-0,82), la L y la EA no cumplieron con el criterio de la CCI, lo que cuestiona este protocolo para su uso en el futuro.
Como ya se ha mencionado anteriormente, la duración de la medición es un aspecto crítico cuando se trabaja con perros. Es posible que ciertos parámetros de la COP ya incorporen información clínica importante en un corto período de tiempo. Por ejemplo, según nuestros resultados, MLD, CCD y SS alcanzan un ICC ≥ 0,6 cuando se utilizan al menos dos secuencias de 2 s, mientras que L y AS no alcanzaron el umbral incluso cuando se utilizaron secuencias de 10 2 s. Este hallazgo podría ser relevante para perros ancianos y animales con ciertas condiciones patológicas, como enfermedades neurodegenerativas o musculoesqueléticas. Es posible que estos animales deteriorados no puedan permanecer quietos durante largos períodos (por ejemplo, dos veces 5 s), por lo que no se puede evaluar la gama completa de parámetros COP. Por lo tanto, es necesario realizar más estudios para determinar ciertos parámetros COP que capturen aspectos clínicamente relevantes del equilibrio y el balanceo corporal en períodos de tiempo cortos en animales que no pueden permanecer quietos durante períodos más largos.
Este estudio evaluó un amplio panel de parámetros de COP. Esos parámetros COP convencionales (lineales) son indicadores de estabilidad postural (55, 56). Según nuestros resultados, los parámetros de COP podrían haberse visto afectados por la duración de la medición. Cabe destacar que la duración de medición más corta (1 s) y la más larga (20 s) tuvieron los resultados menos confiables. Hasta donde sabemos, esto no se ha publicado antes en medicina veterinaria. Sin embargo, en los últimos años, se han investigado métodos no lineales como la entropía de la muestra y la entropía aproximada en la medicina humana (57, 58). Estos algoritmos no lineales evalúan la aleatoriedad de las series de datos y analizan la no linealidad en la dinámica del balanceo postural mediante la evaluación de las irregularidades presentes en los datos de las series temporales de la COP (57, 58). Los estudios futuros deberían explorar esos métodos analíticos adicionales para centrarse en este fenómeno con más detalle.
En este estudio, uno de los tres observadores generó los datos del ensayo para un perro. Sin embargo, para analizar los parámetros de COP, cada observador seleccionó un punto de partida dentro de cada ensayo de todos los perros individualmente. Cada observador se sometió previamente a un entrenamiento práctico con varios perros y diferentes condiciones de prueba. Esto incluyó encontrar la duración ideal de la medición de 20 s dentro de cada ensayo (M1, M2 y M3), durante el cual los perros permanecieron quietos para un análisis adicional. Además, recibieron formación específica en el software de análisis y se adhirieron a un protocolo operativo estándar. A pesar de los diferentes puntos de partida (diferencia de 0,01 a 33,44 s), se logró un excelente CCI (>0,93). En consecuencia, se puede inferir que poseían los mismos niveles de experiencia en la adquisición de datos, lo que fue confirmado por la excelente confiabilidad entre observadores.
Una limitación de este estudio fue la ausencia de un tercer análisis (M3) para uno de los perros incluidos. A diferencia de los otros perros, en este en particular era imposible lograr secuencias válidas sin ningún movimiento de cabeza y cola de dos de los observadores. Como resultado, se excluyó un ensayo (M3). Siete perros exhibieron secuencias incompletas de 20 s, lo que llevó a la selección del período válido más largo para el análisis en estos perros (p. ej., período largo de 15 s). Hay que señalar que solo el 50% de los perros fueron capaces de quedarse quietos durante al menos 30 segundos consecutivos. Otra limitación de este estudio es la utilización de una pequeña cohorte de perros sanos. Aunque el bajo tamaño de la muestra puede no afectar la concordancia (ICC) entre los observadores, sí afecta el tamaño del conjunto de datos analizado (ANOVA). Es por ello que sugerimos incorporar una gama más diversa de perros con diferentes morfologías y parámetros antropométricos (peso corporal y talla) (25, 37), así como perros ancianos y aquellos con diferentes condiciones ortopédicas y neurológicas (13, 15, 20). Esto ayudará a ofrecer información adicional sobre los parámetros que se están investigando. Además, explorar la influencia de la fatiga muscular cuando se está de pie durante períodos prolongados en los datos de COP podría presentar una vía prometedora para futuras investigaciones.
5 Conclusión
En conclusión, estos hallazgos sugieren que la realización de una medición de 10 s o dos de 5 s produce resultados óptimos para la evaluación del equilibrio postural en perros cuando se analizan los datos convencionales de COP durante la posturografía estática. Una mayor exploración de los factores fisiológicos y patológicos y el impacto de los movimientos más sutiles durante la posturografía estática, como la frecuencia respiratoria, podría mejorar este enfoque de medición. El establecimiento de una metodología estandarizada basada en estos conocimientos permitiría a los investigadores extraer conclusiones más sólidas de los estudios existentes y facilitaría las comparaciones entre los resultados publicados y los hallazgos de sus investigaciones.
Declaración de disponibilidad de datos
Los conjuntos de datos presentados en este estudio se pueden encontrar en repositorios en línea. Los nombres de los repositorios y los números de acceso se pueden encontrar en el artículo/Material complementario.
Declaración ética
Los estudios en animales fueron aprobados por el Comité de Ética y Bienestar Animal de la Universidad de Medicina Veterinaria de Viena de acuerdo con las directrices de la Universidad para las Buenas Prácticas Científicas (ETK-148/10/2021). Los estudios se llevaron a cabo de acuerdo con la legislación local y los requisitos institucionales. Se obtuvo el consentimiento informado por escrito de los propietarios para la participación de sus animales en este estudio.
Contribuciones de los autores
MA: Conceptualización, Curación de datos, Análisis formal, Investigación, Metodología, Validación, Visualización, Escritura – borrador original, Escritura – revisión y edición. NA: Conceptualización, Curación de datos, Análisis formal, Investigación, Metodología, Validación, Visualización, Redacción – borrador original, Redacción – revisión y edición. CL: Conceptualización, Curación de datos, Análisis formal, Investigación, Metodología, Validación, Visualización, Redacción – borrador original, Redacción – revisión y edición. CP: Conceptualización, Curación de datos, Análisis formal, Investigación, Metodología, Validación, Visualización, Redacción – borrador original, Redacción – revisión y edición. AT: Análisis formal, Metodología, Validación, Redacción – revisión y edición. BB: Conceptualización, Curación de datos, Análisis formal, Obtención de fondos, Investigación, Metodología, Administración de proyectos, Recursos, Supervisión, Validación, Visualización, Redacción – borrador original, Redacción – revisión y edición.
Financiación
El/los autor/es declaran/n que se recibió apoyo financiero para la investigación, autoría y/o publicación de este artículo. Esta investigación fue financiada total o parcialmente por el Fondo Austriaco para la Ciencia (FWF) [10.55776/P34959]. Para fines de acceso abierto, el autor ha aplicado una licencia pública de derechos de autor CC BY a cualquier versión manuscrita aceptada por el autor que surja de esta presentación.
Reconocimientos
Los autores expresan su más sincero agradecimiento a los dueños de perros y a sus compañeros caninos por su participación en este proyecto de investigación.
Conflicto de intereses
Los autores declaran que la investigación se llevó a cabo en ausencia de relaciones comerciales o financieras que pudieran interpretarse como un posible conflicto de intereses.
El/los autor/es declararon, en el momento de la presentación, ser miembro del consejo editorial de Frontiers. Esto no tuvo ningún impacto en el proceso de revisión por pares ni en la decisión final.
Nota del editor
Todas las afirmaciones expresadas en este artículo son únicamente las de los autores y no representan necesariamente las de sus organizaciones afiliadas, ni las del editor, los editores y los revisores. Cualquier producto que pueda ser evaluado en este artículo, o afirmación que pueda ser hecha por su fabricante, no está garantizado ni respaldado por el editor.
Material complementario
El material complementario para este artículo se puede encontrar en línea en: https://www.frontiersin.org/articles/10.3389/fvets.2024.1353824/full#supplementary-material
Abreviaturas
COP, centro de presión; DLM mediolateral; DCC: craneocaudal; L: longitud total; AS: velocidad media; SS, superficie de apoyo; ICC: coeficiente de correlación intraclase; GRF, fuerzas de reacción terrestres; COM, centro de masas; SI: índice de simetría; PFz: fuerza vertical máxima; IFz: impulso vertical; XFz: valor medio de PFz o Ifz; LLx: extremidad anterior o posterior izquierda; RLx: extremidad anterior o posterior derecha; M (1-3), el recuento de ensayos realizados para cada perro en la plataforma de presión; Categoría, seis formas diferentes en que se analizó cada ensayo; Secuencia, cada categoría presentaba secuencias que duraban de 1 a 20 s, categorizadas de acuerdo con ellas; ANOVA: análisis de varianza; DE: desviación estándar.
Referencias
1. DeCamp CE. Análisis cinético y cinemático de la marcha y la evaluación de la cojera en el perro. Vet Clin North Am Small Anim Pract. (1997) 27:825–40. doi: 10.1016/S0195-5616(97)50082-9
Resumen de PubMed | Texto completo de Crossref | Google Académico
2. Pitti L, Oosterlinck M, Díaz-Bertrana ML, Carrillo JM, Rubio M, Sopena J, et al. Evaluación de la posturografía estática y pedobarografía para la detección de cojera unilateral de las extremidades anteriores en ponis. BMC Vet Res. (2018) 14:151. doi: 10.1186/s12917-018-1462-8
Resumen de PubMed | Texto completo de Crossref | Google Académico
3. Schnabl-Feichter E, Tichy A, Bockstahler B. Evaluación de una placa de presión para la detección de cojera de las extremidades traseras en gatos. PLoS UNO. (2020) 15:e0231904. doi: 10.1371/journal.pone.0231904
Resumen de PubMed | Texto completo de Crossref | Google Académico
4. Quinn MM, Keuler NS, Lu Y, Faria ML, Muir P, Markel MD. Evaluación de la concordancia entre las escalas numéricas, las escalas de puntuación analógicas visuales y el análisis de la marcha de la placa de fuerza en perros. Cirugía veterinaria. (2007) 36:360–7. doi: 10.1111/j.1532-950X.2007.00276.x
Resumen de PubMed | Texto completo de Crossref | Google Académico
5. Sandberg G, Torres B, Berjeski A, Budsberg S. Comparación de datos cinéticos recopilados simultáneamente con placas de fuerza y una pasarela de presión. Veterinario Comp Orthop Traumatol. (2018) 31:327–31. doi: 10.1055/s-0038-1666875
Resumen de PubMed | Texto completo de Crossref | Google Académico
6. Donnell JR, Frisbie DD, King MR, Goodrich LR, Haussler KK. Comparación de la evaluación subjetiva de la cojera, plataformas de fuerza y un sistema de sensores inerciales para identificar cojera leve en un modelo de artrosis equina. Veterinario J. (2015) 206:136–42. doi: 10.1016/j.tvjl.2015.08.004
Resumen de PubMed | Texto completo de Crossref | Google Académico
7. Conzemius MG, Torres BT, Muir P, Evans R, Krotscheck U, Budsberg S. Best practices for measuring and reporting ground reaction forces in dogs. Vet Surg. (2022) 51:385–96. doi: 10.1111/vsu.13772
8. Faraldo-García A, Santos-Pérez S, Crujeiras-Casais R, Labella-Caballero T, Soto-Varela A. Influence of age and gender in the sensory analysis of balance control. Eur Arch Otorhinolaryngol. (2012) 269:673–7. doi: 10.1007/s00405-011-1707-7
9. Ivanenko Y, Gurfinkel VS. Human postural control. Front Neurosci. (2018) 12:795. doi: 10.3389/fnins.2018.00171
10. Black FO, Wall C, Nashner LM. Effects of visual and support surface orientation references upon postural control in vestibular deficient subjects. Acta Otolaryngol. (1983) 95:199–210. doi: 10.3109/00016488309130936
11. Hue O, Simoneau M, Marcotte J, Berrigan F, Doré J, Marceau P, et al. Body weight is a strong predictor of postural stability. Gait Posture. (2007) 26:32–8. doi: 10.1016/j.gaitpost.2006.07.005
12. Palmieri RM, Ingersoll CD, Stone MB, Krause BA. Center-of-pressure parameters used in the assessment of postural control. J Sport Rehabil. (2002) 11:51–66. doi: 10.1123/jsr.11.1.51
13. López S, Vilar JM, Rubio M, Sopena JJ, Damiá E, Chicharro D, et al. Center of pressure limb path differences for the detection of lameness in dogs: a preliminary study. BMC Vet Res. (2019) 15:138. doi: 10.1186/s12917-019-1881-1
14. Winter DA, Patla AE, Ishac M, Gage WH. Motor mechanisms of balance during quiet standing. J Electromyogr Kinesiol. (2003) 13:49–56. doi: 10.1016/S1050-6411(02)00085-8
15. Carrillo JM, Manera ME, Rubio M, Sopena J, Santana A, Vilar JM. Posturography and dynamic pedobarography in lame dogs with elbow dysplasia and cranial cruciate ligament rupture. BMC Vet Res. (2018) 14:108. doi: 10.1186/s12917-018-1435-y
16. Charalambous D, Lutonsky C, Keider S, Tichy A, Bockstahler B. Vertical ground reaction forces, paw pressure distribution, and center of pressure during heelwork in working dogs competing in obedience. Front Vet Sci. (2023) 10:1106170. doi: 10.3389/fvets.2023.1106170
17. Charalambous D, Strasser T, Tichy A, Bockstahler B. Ground reaction forces and center of pressure within the paws when stepping over obstacles in dogs. Animals. (2022) 12:1702. doi: 10.3390/ani12131702
18. Virag Y, Gumpenberger M, Tichy A, Lutonsky C, Peham C, Bockstahler B. Center of pressure and ground reaction forces in Labrador and Golden Retrievers with and without hip dysplasia at 4, 8, and 12 months of age. Front Vet Sci. (2022) 9:1087693. doi: 10.3389/fvets.2022.1087693
19. Reicher B, Tichy A, Bockstahler B. Center of pressure in the paws of clinically sound dogs in comparison with orthopedically diseased dogs. Animals. (2020) 10:1366. doi: 10.3390/ani10081366
20. Manera ME, Carrillo JM, Batista M, Rubio M, Sopena J, Santana A, et al. Static posturography: a new perspective in the assessment of lameness in a canine model. PLoS ONE. (2017) 12:e0170692. doi: 10.1371/journal.pone.0170692
21. Lewis MJ, Williams KD, Langley T, Jarvis LM, Sawicki GS, Olby NJ. Development of a novel gait analysis tool measuring center of pressure for evaluation of canine chronic thoracolumbar spinal cord injury. J Neurotrauma. (2019) 36:3018–25. doi: 10.1089/neu.2019.6479
22. Blau SR, Davis LM, Gorney AM, Dohse CS, Williams KD, Lim J-H, et al. Quantifying center of pressure variability in chondrodystrophoid dogs. Vet J. (2017) 226:26–31. doi: 10.1016/j.tvjl.2017.07.001
23. Linder JE, Thomovsky S, Bowditch J, Lind M, Kazmierczak KA, Breur GJ, et al. Development of a simple method to measure static body weight distribution in neurologically and orthopedically normal mature small breed dogs. BMC Vet Res. (2021) 17:110. doi: 10.1186/s12917-021-02808-x
24. Clough WT, Canapp SO, Taboada L de, Dycus DL, Leasure CS. Sensitivity and specificity of a weight distribution platform for the detection of objective lameness and orthopaedic disease. Vet Comp Orthop Traumatol. (2018) 31:391–5. doi: 10.1055/s-0038-1667063
25. Mondino A, Wagner G, Russell K, Lobaton E, Griffith E, Gruen M, et al. Static posturography as a novel measure of the effects of aging on postural control in dogs. PLoS ONE. (2022) 17:e0268390. doi: 10.1371/journal.pone.0268390
26. Heffernan AE, Katz EM, Sun Y, Rendahl AK, Conzemius MG. Once daily oral extended-release hydrocodone as analgesia following tibial plateau leveling osteotomy in dogs. Vet Surg. (2018) 47:516–23. doi: 10.1111/vsu.12792
27. Davila D, Keeshen TP, Evans RB, Conzemius MG. Comparison of the analgesic efficacy of perioperative firocoxib and tramadol administration in dogs undergoing tibial plateau leveling osteotomy. J Am Vet Med Assoc. (2013) 243:225–31. doi: 10.2460/javma.243.2.225
28. Horstman CL, Conzemius MG, Evans R, Gordon WJ. Assessing the efficacy of perioperative oral carprofen after cranial cruciate surgery using noninvasive, objective pressure platform gait analysis. Vet Surg. (2004) 33:286–92. doi: 10.1111/j.1532-950x.2004.04042.x
29. Lascelles BD, Roe SC, Smith E, Reynolds L, Markham J, Marcellin-Little D, et al. Evaluation of a pressure walkway system for measurement of vertical limb forces in clinically normal dogs. Am J Vet Res. (2006) 67:277–82. doi: 10.2460/ajvr.67.2.277
30. Lee DV, Bertram JE, Todhunter RJ. Acceleration and balance in trotting dogs. J Exp Biol. (1999) 202:3565–73. doi: 10.1242/jeb.202.24.3565
31. Phelps HA, Ramos V, Shires PK, Werre SR. The effect of measurement method on static weight distribution to all legs in dogs using the Quadruped Biofeedback System. Vet Comp Orthop Traumatol. (2007) 20:108–12. doi: 10.1160/VCOT-06-04-0031
32. Seibert R, Marcellin-Little DJ, Roe SC, DePuy V, Lascelles BD. Comparison of body weight distribution, peak vertical force, and vertical impulse as measures of hip joint pain and efficacy of total hip replacement. Vet Surg. (2012) 41:443–7. doi: 10.1111/j.1532-950X.2012.00957.x
33. Vero AM, Wagner G, Lobaton E, Russell K, Olby N. Age-related changes in posture steadiness in the companion dog. Innov Aging. (2021) 5:959. doi: 10.1093/geroni/igab046.3461
34. Lee S, Lee J-M, Park H, Cha Y, Cheong J. Balance evaluation after reconstruction of medial patellar luxation in small-sized dogs with WII balance board. J Vet Clin. (2019) 36:301–5. doi: 10.17555/jvc.2019.12.36.6.301
35. Lee S, Lee J-M, Park H, Cha Y, Cheong J. Validity of the WII balance board for evaluation of medial patellar luxation in small sized dog. J Vet Clin. (2019) 36:297–300. doi: 10.17555/jvc.2019.12.36.6.297
36. Lutonsky C, Peham C, Mucha M, Reicher B, Gaspar R, Tichy A, et al. Las perturbaciones mecánicas externas desafían la estabilidad postural en los perros. Front Vet Sci. (2023) 10:1249951. doi: 10.3389/fvets.2023.1249951
Resumen de PubMed | Texto completo de Crossref | Google Académico
37. Shaheen AF, Lins D, Toledo T, Gómez Álvarez CB. Medidas de estabilidad postural en perros salchicha miniatura sanos obtenidas mediante una colchoneta de presión y una plataforma de fuerza: un estudio de validez y fiabilidad. BMC Vet Res. (2023) 19:79. doi: 10.1186/s12917-023-03633-0
Resumen de PubMed | Texto completo de Crossref | Google Académico
38. Chang Y-H, Ting LH. Evidencia mecánica de que los flamencos pueden sostener su cuerpo sobre una pierna con poca fuerza muscular activa. Biol Lett. (2017) 13:948. doi: 10.1098/rsbl.2016.0948
Resumen de PubMed | Texto completo de Crossref | Google Académico
39. Clayton HM, Bialski DE, Lanovaz JL, Mullineaux DR. Evaluación de la fiabilidad de una técnica para medir el balanceo postural en caballos. Am J Vet Res. (2003) 64:1354–9. doi: 10.2460/ajvr.2003.64.1354
Resumen de PubMed | Texto completo de Crossref | Google Académico
40. Clayton HM, Buchholz R, Nauwelaerts S. Relación entre variables morfológicas y estabilográficas en caballos de pie. Veterinario J. (2013) 198:e65-9. doi: 10.1016/j.tvjl.2013.09.035
Resumen de PubMed | Texto completo de Crossref | Google Académico
41. Dewolf AH, Ivanenko YP, Mesquita RM, Willems PA. Control postural en el elefante. J Exp Biol. (2021) 224:243648. doi: 10.1242/jeb.243648
Resumen de PubMed | Texto completo de Crossref | Google Académico
42. Ellis KL, King MR. Relación entre la estabilidad postural y la adaptación del músculo paraespinal en caballos cojos en rehabilitación. J Equine Vet Sci. (2020) 91:103108. doi: 10.1016/j.jevs.2020.103108
Resumen de PubMed | Texto completo de Crossref | Google Académico
43. Gomes-Costa M, Roupa I, Pequito M, Prazeres J, Gaivão M, Abrantes J, et al. El uso de placas de presión para el análisis estático del centro de presión en caballos. J Equine Vet Sci. (2015) 35:315–20. doi: 10.1016/j.jevs.2015.02.002
44. Moorman VJ, Kawcak CE, King MR. Evaluación de un dispositivo de medios portátiles para su uso en la determinación de la estabilidad postural en caballos de pie. Am J Vet Res. (2017) 78:1036–42. doi: 10.2460/ajvr.78.9.1036
Resumen de PubMed | Texto completo de Crossref | Google Académico
45. Nauwelaerts S, Malone SR, Clayton HM. Desarrollo del equilibrio postural en potros. Veterinario J. (2013) 198:e70-4. doi: 10.1016/j.tvjl.2013.09.036
Resumen de PubMed | Texto completo de Crossref | Google Académico
46. Schleining JA, McClure SR, Derrick TR, Wang C. Efectos de las almohadillas aislantes de espuma de poliestireno industrial en el centro de presión y distribución de carga en las patas delanteras de caballos clínicamente normales. Am J Vet Res. (2011) 72:628–33. doi: 10.2460/ajvr.72.5.628
Resumen de PubMed | Texto completo de Crossref | Google Académico
47. Hubrecht RC, Carter E. Las 3R y la técnica experimental humana: implementar el cambio. Animales. (2019) 9:100754. doi: 10.3390/ani9100754
Resumen de PubMed | Texto completo de Crossref | Google Académico
48. Budsberg SC, Jevens DJ, Brown J, Foutz TL, DeCamp CE, Reece L. Evaluación de los índices de simetría de las extremidades, utilizando las fuerzas de reacción del suelo en perros sanos. Am J Vet Res. (1993) 54:1569–74. doi: 10.2460/ajvr.1993.54.10.1569
Resumen de PubMed | Texto completo de Crossref | Google Académico
49. Roush JK, McLaughlin RM. Efectos del tiempo y la velocidad de la postura del sujeto en las fuerzas de reacción del suelo en galgos clínicamente normales al caminar. Am J Vet Res. (1994) 55:1672–6. doi: 10.2460/ajvr.1994.55.12.1672
Resumen de PubMed | Texto completo de Crossref | Google Académico
50. Hans EC, Zwarthoed B, Seliski J, Nemke B, Muir P. Varianza asociada con la velocidad del sujeto y la repetición del ensayo durante el análisis de la marcha de la plataforma de fuerza en una población heterogénea de perros clínicamente normales. Veterinario J. (2014) 202:498–502. doi: 10.1016/j.tvjl.2014.09.022
Resumen de PubMed | Texto completo de Crossref | Google Académico
51. Regier DA, Narrow WE, Clarke DE, Kraemer HC, Kuramoto SJ, Kuhl EA, et al. Ensayos de campo del DSM-5 en los Estados Unidos y Canadá, parte II: fiabilidad test-retest de diagnósticos categóricos seleccionados. AJP. (2013) 170:59–70. doi: 10.1176/appi.ajp.2012.12070999
Resumen de PubMed | Texto completo de Crossref | Google Académico
52. Clayton HM, Nauwelaerts S. Efecto de la venda en los ojos sobre las variables del centro de presión en caballos sanos durante la bipedestación tranquila. Veterinario J. (2014) 199:365–9. doi: 10.1016/j.tvjl.2013.12.018
Resumen de PubMed | Texto completo de Crossref | Google Académico
53. MacPherson J, Horak FB. Capítulo 41. Postura. En:Kandel E, Schwartz J, Jessell T, Siegelbaum S, Hudspeth AJ, , editores. En Principios de la Ciencia Neural, 5ª ed. (2013). págs. 935-59.
54. Funato T, Sato Y, Fujiki S, Sato Y, Aoi S, Tsuchiya K, et al. Control postural durante la bipedestación tranquila en ratas. PLoS UNO. (2017) 12:e0189248. doi: 10.1371/journal.pone.0189248
Resumen de PubMed | Texto completo de Crossref | Google Académico
55. Paillard T, Noé F. Técnicas y métodos para evaluar la función postural en sujetos sanos y patológicos. Biomed Res Int. (2015) 2015:891390. doi: 10.1155/2015/891390
Resumen de PubMed | Texto completo de Crossref | Google Académico
56. Quijoux F, Nicolaï A, Chairi I, Bargiotas I, Ricard D, Yelnik A, et al. Una revisión de las variables del centro de presión (COP) para cuantificar el equilibrio de pie en personas mayores: algoritmos y código de acceso abierto. Physiol Rep. (2021) 9:e15067. doi: 10.14814/phy2.15067
Resumen de PubMed | Texto completo de Crossref | Google Académico
57. Delgado-Bonal A, Marshak A. Entropía aproximada y entropía de muestra: un tutorial completo. Entropía. (2019) 21:541. doi: 10.3390/e21060541
Resumen de PubMed | Texto completo de Crossref | Google Académico
58. Viseu J-P, Yiou E, Morin P-O, Olivier A. Efectos dependientes del deporte en el control sensorial del equilibrio durante la postura erguida: una comparación entre jinetes profesionales, judokas y no atletas. Neurosci frontal zumbido. (2023) 17:1213385. doi: 10.3389/fnhum.2023.1213385
Resumen de PubMed | Texto completo de Crossref | Google Académico
Palabras clave: cinética, análisis de la marcha, COP, fuerzas de reacción en tierra, fiabilidad interobservador, fiabilidad test-retest, perro
Cita: Aghapour M, Affenzeller N, Lutonsky C, Peham C, Tichy A y Bockstahler B (2024) Un estudio de validación para analizar la fiabilidad de los datos del centro de presión en la posturografía estática en perros. Frente. Vet. Sci. 11:1353824. doi: 10.3389/fvets.2024.1353824
Recibido: 11 de diciembre de 2023; Aceptado: 26 de febrero de 2024;
Publicado: 14 marzo 2024.
Editado por:
Muhammad Saqib, Universidad de Agricultura, Faisalabad, Pakistán
Revisado por:
Mónica Rubio, Universidad CEU Cardenal Herrera, España
Lindsay B. St. George, Universidad de Central Lancashire, Reino Unido
Derechos de autor © 2024 Aghapour, Affenzeller, Lutonsky, Peham, Tichy y Bockstahler. Este es un artículo de acceso abierto distribuido bajo los términos de la Licencia Creative Commons Attribution License (CC BY).
*Correspondencia: Masoud Aghapour, masoud.aghapour@vetmeduni.ac.at
†Estos autores han contribuido igualmente a este trabajo y comparten la primera autoría
Renuncia: Todas las afirmaciones expresadas en este artículo son únicamente las de los autores y no representan necesariamente las de sus organizaciones afiliadas, ni las del editor, los editores y los revisores. Cualquier producto que pueda ser evaluado en este artículo o afirmación que pueda hacer su fabricante no está garantizado ni respaldado por el editor.
Date de alta y recibe nuestro 👉🏼 Diario Digital AXÓN INFORMAVET ONE HEALTH
Date de alta y recibe nuestro 👉🏼 Boletín Digital de Foro Agro Ganadero
Noticias animales de compañía
Noticias animales de producción
Trabajos técnicos animales de producción
Trabajos técnicos animales de compañía